 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
2024年5月 この範囲を時系列順で読む この範囲をファイルに出力する


RaspberryPiに最新のOS(bookworm)を入れてみました。
ナニかおかしい・・・。
調べてみたら、bookwormではネットワークの設定方法が変わったらしい。dhcpcdではなくNetworkManagerらしい。
これは勉強しなおさんといかん。
このあたり、ちょくちょく変わるので面倒である。
追記
ちょっと早起きしたので NetworkManeger について調べてみました。
dhcpcd とは違うけれど、設定ファイルを書いてもコマンドでも設定が出来る。
そもそも何なのよ、を理解するのに少し時間がかかりましたが、覚えてしまえばこちらの方が楽かもしれない。
次の記事はわかりやすいかも。
「NetworkManagerの接続設定作成用テンプレート」
Art-Net で使うipv4アドレスを自動設定するところまでやってみましょう。
追記+
NetworkManager の設定を変更するには modify を使います。
まだわからないことがあるので手順は示しませんが、modify は設定ファイルの変更であってこれを実行しても有効にはなりません。
down して up する操作が必要です。
#RaspberryPi
ナニかおかしい・・・。
調べてみたら、bookwormではネットワークの設定方法が変わったらしい。dhcpcdではなくNetworkManagerらしい。
これは勉強しなおさんといかん。
このあたり、ちょくちょく変わるので面倒である。
追記
ちょっと早起きしたので NetworkManeger について調べてみました。
dhcpcd とは違うけれど、設定ファイルを書いてもコマンドでも設定が出来る。
そもそも何なのよ、を理解するのに少し時間がかかりましたが、覚えてしまえばこちらの方が楽かもしれない。
次の記事はわかりやすいかも。
「NetworkManagerの接続設定作成用テンプレート」
Art-Net で使うipv4アドレスを自動設定するところまでやってみましょう。
追記+
NetworkManager の設定を変更するには modify を使います。
まだわからないことがあるので手順は示しませんが、modify は設定ファイルの変更であってこれを実行しても有効にはなりません。
down して up する操作が必要です。
#RaspberryPi
RaspberryPiの開発セットが完成しました。
開発に使用する用品をマジックテープ付きの合板に貼り付けてスロットインします。
常に仮組みしておく意図です。作業の都度組まなくても済みますし作業場所も選びません。
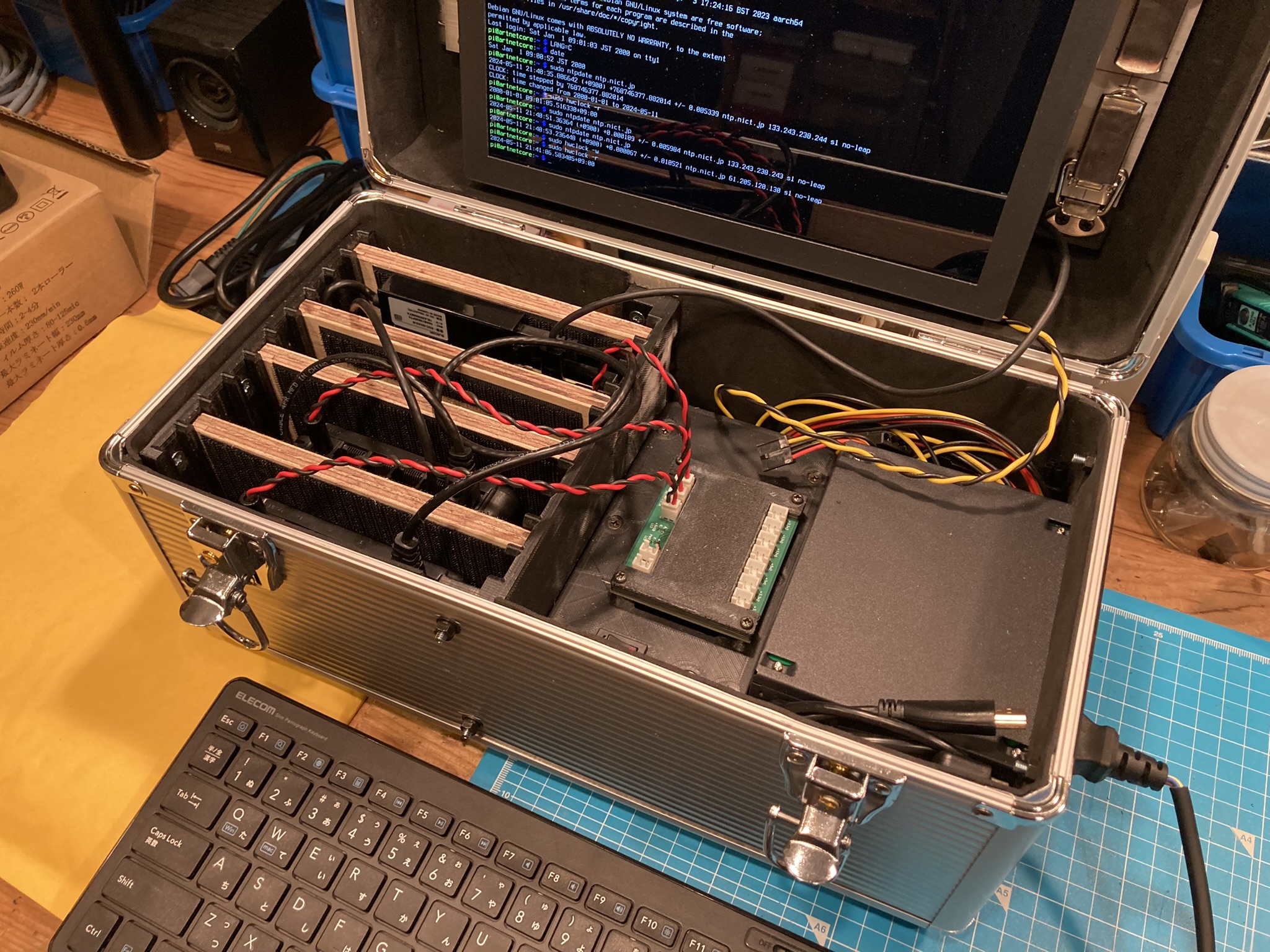
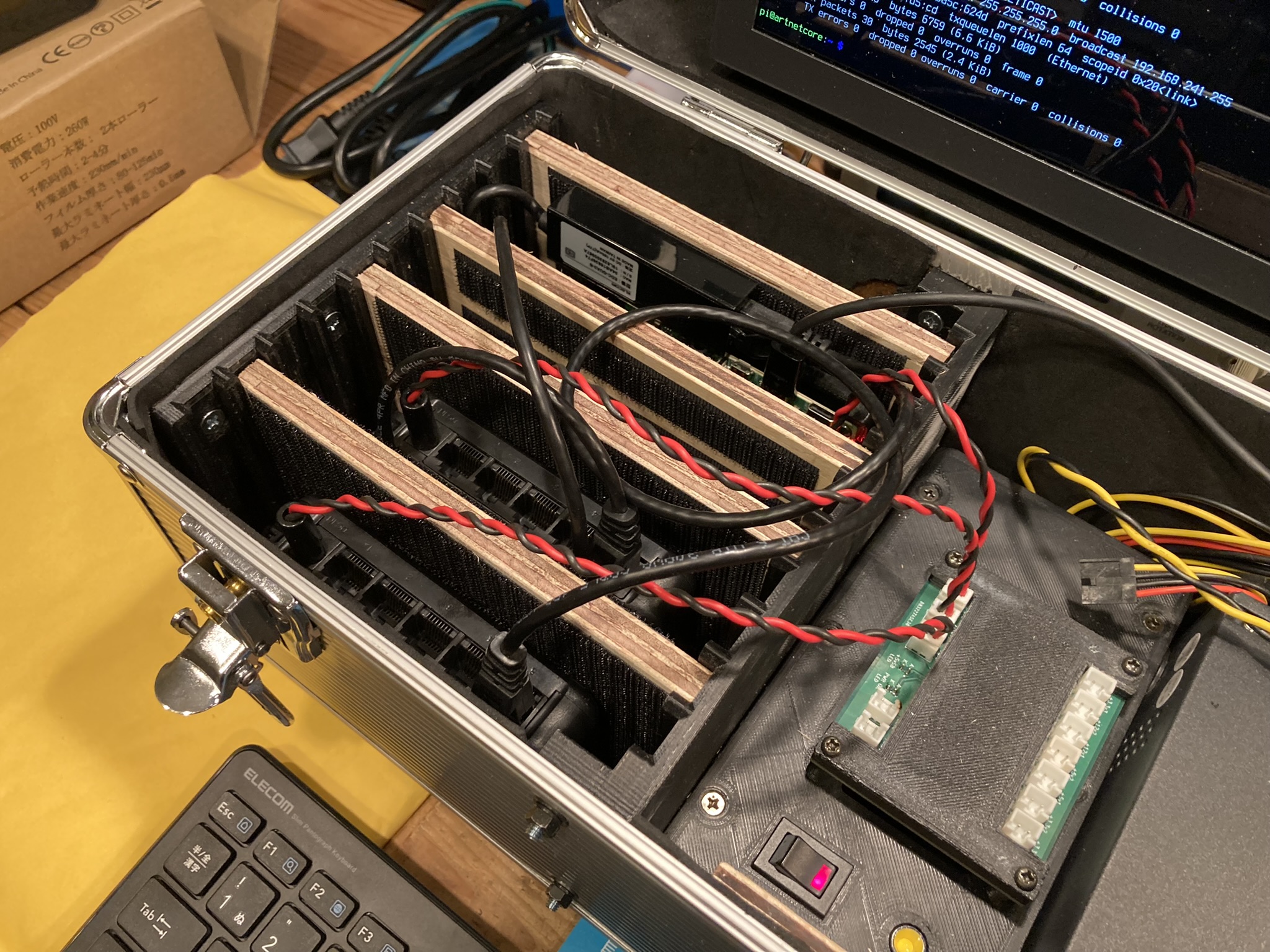
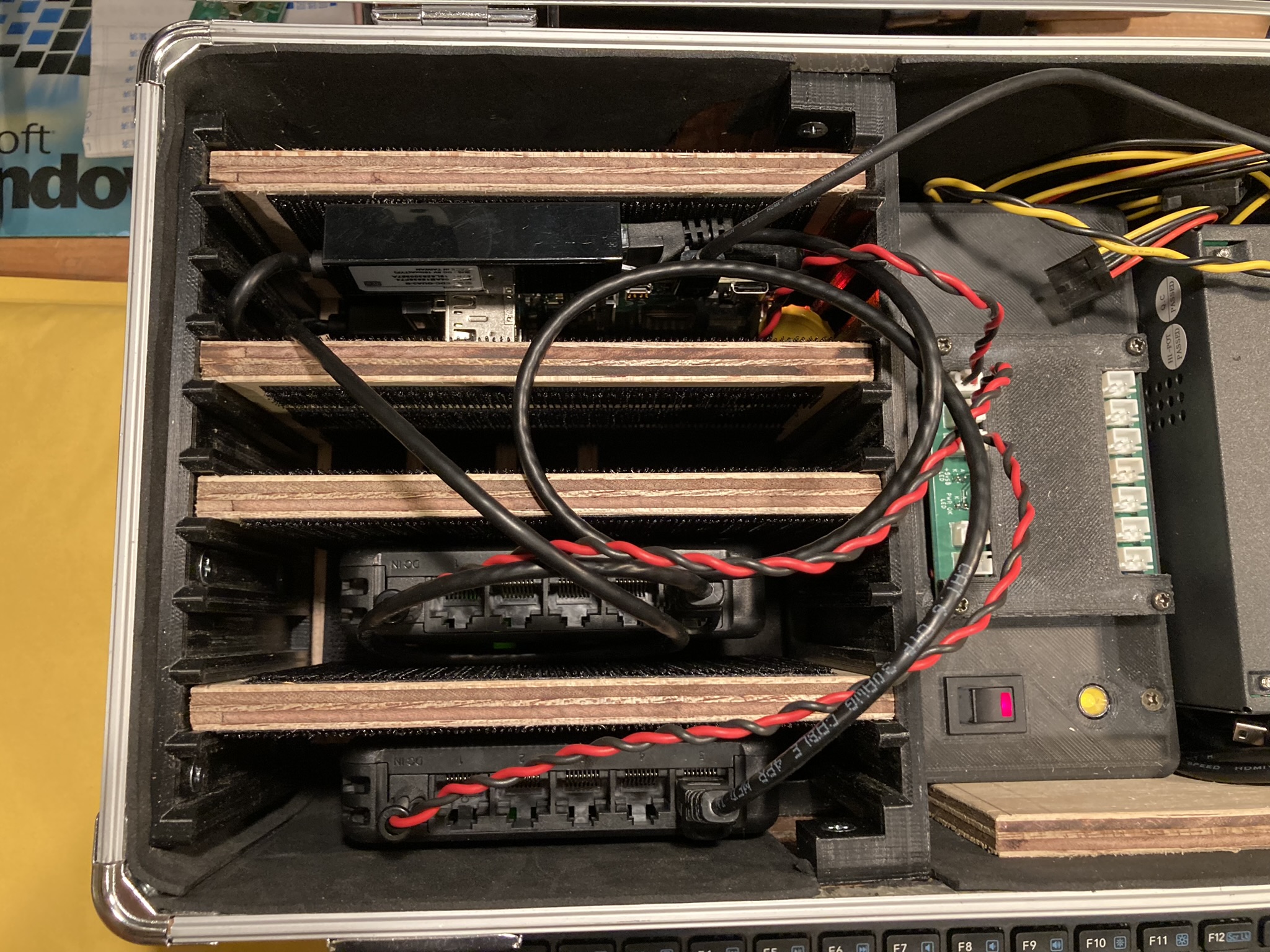
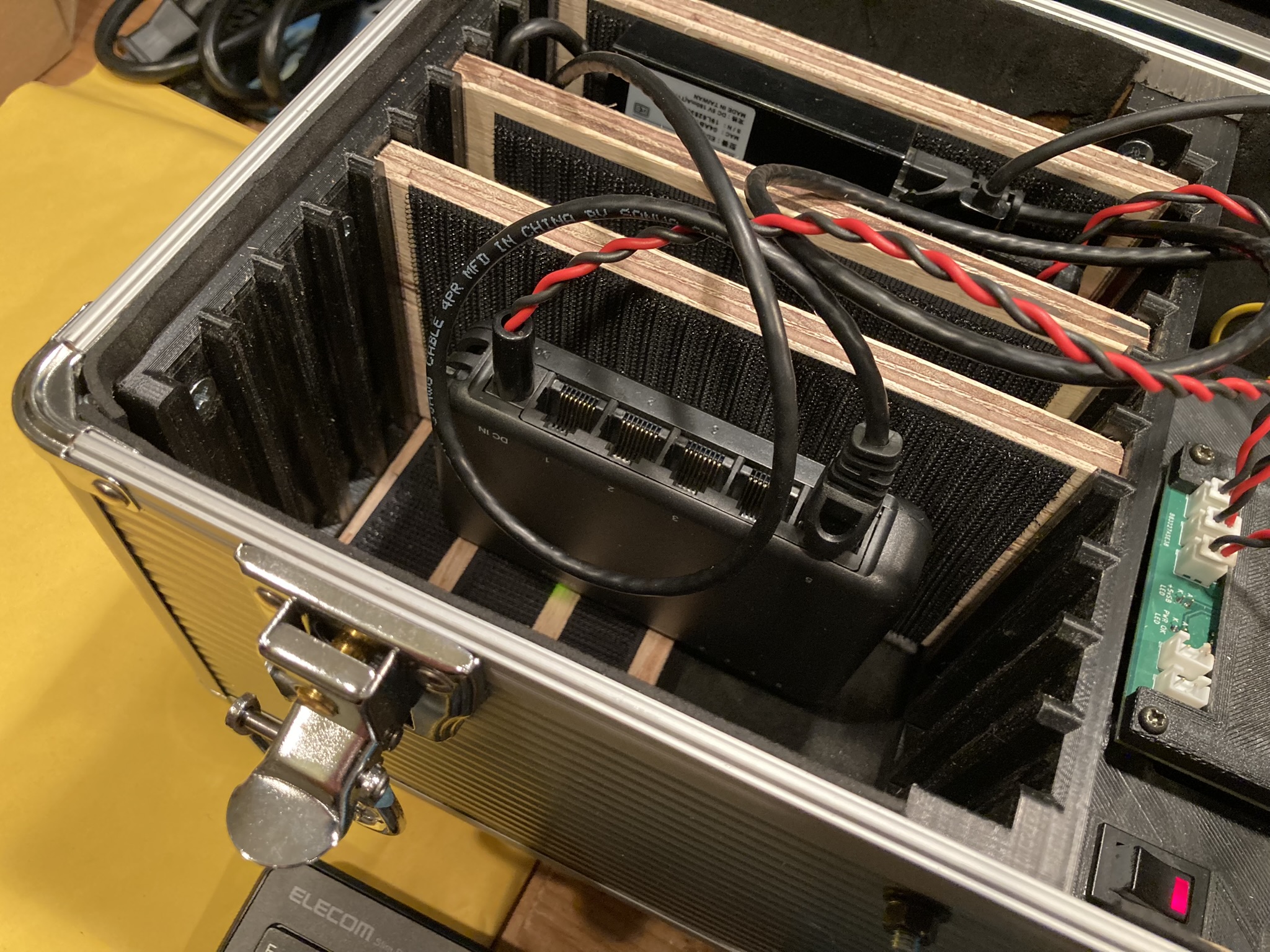
現在の案件はArtNetPatchですからHubが2個です。一番奥のスロットにRaspberryPiが入っています。
仕上げは大雑把ですが便利です。
#RaspberryPi #[Art-Net]
開発に使用する用品をマジックテープ付きの合板に貼り付けてスロットインします。
常に仮組みしておく意図です。作業の都度組まなくても済みますし作業場所も選びません。
現在の案件はArtNetPatchですからHubが2個です。一番奥のスロットにRaspberryPiが入っています。
仕上げは大雑把ですが便利です。
#RaspberryPi #[Art-Net]
単相三線や三相四線を入力する器具を改造してました。アナログ電圧計からパッシブタイプの7ゼグ電圧計へ換装です。
これまではアナログ電圧計1個に対しロータリースイッチで相を切り替えていましたが、スイッチの接点不良が出始めたので小ぶりなパッシブタイプ7ゼグ電圧計3個に変更です。入力の有無と接続間違いをチェックするのが目的ですから中華電機の安物でもいいかなと。寿命に不安はありますが、3個でもスイッチ接点の半値以下だし、各相を同時に見られるのは悪くないかなと。取り付けパネルは3Dプリンタ製です。
#器具の修理
これまではアナログ電圧計1個に対しロータリースイッチで相を切り替えていましたが、スイッチの接点不良が出始めたので小ぶりなパッシブタイプ7ゼグ電圧計3個に変更です。入力の有無と接続間違いをチェックするのが目的ですから中華電機の安物でもいいかなと。寿命に不安はありますが、3個でもスイッチ接点の半値以下だし、各相を同時に見られるのは悪くないかなと。取り付けパネルは3Dプリンタ製です。
#器具の修理
12tのコンパネを貼り合わせて24tにした物を治具から外しました。若干の反りはありますが許容範囲です。元々反りがありましたので完璧を求めても無理なモノは無理です。蒸気室で蒸してプレスすれば治るんでしょうけど。
一番の問題は3x6平台状の治具をどこに仕舞うかです。使用頻度が低いので良い場所を占領したくありませんが、大きくて重いので奥まったところには置きたくありません。悩ましいところです。
先行して試作した台車にキャスターを取り付けてみました。12tと24tはここまで強度が違うのかと関心する程です。厚みが増したので以前の物より重いのですが、手に取って運ぶ物ではありませんので誤差の範囲でしょう。
ここ半月で普段手を付けられないネタを5品目くらい製作・試作しましたがネタはまだまだあります。時間に余裕がある6月上旬までに出来るだけ進めたい今日この頃。
#ガチ工作 #器具の製作
一番の問題は3x6平台状の治具をどこに仕舞うかです。使用頻度が低いので良い場所を占領したくありませんが、大きくて重いので奥まったところには置きたくありません。悩ましいところです。
先行して試作した台車にキャスターを取り付けてみました。12tと24tはここまで強度が違うのかと関心する程です。厚みが増したので以前の物より重いのですが、手に取って運ぶ物ではありませんので誤差の範囲でしょう。
ここ半月で普段手を付けられないネタを5品目くらい製作・試作しましたがネタはまだまだあります。時間に余裕がある6月上旬までに出来るだけ進めたい今日この頃。
#ガチ工作 #器具の製作
Windows11を非対応とされるパソコンにインストールする方法です。
appraiserres.dllをnullファイル化する方法には驚いた。
#パソコン
appraiserres.dllをnullファイル化する方法には驚いた。
#パソコン
ゴールデンウィーク工作その2?
入力:ミニカムロック(E1015)/出力:C型30A6口のコンセントボックスです。



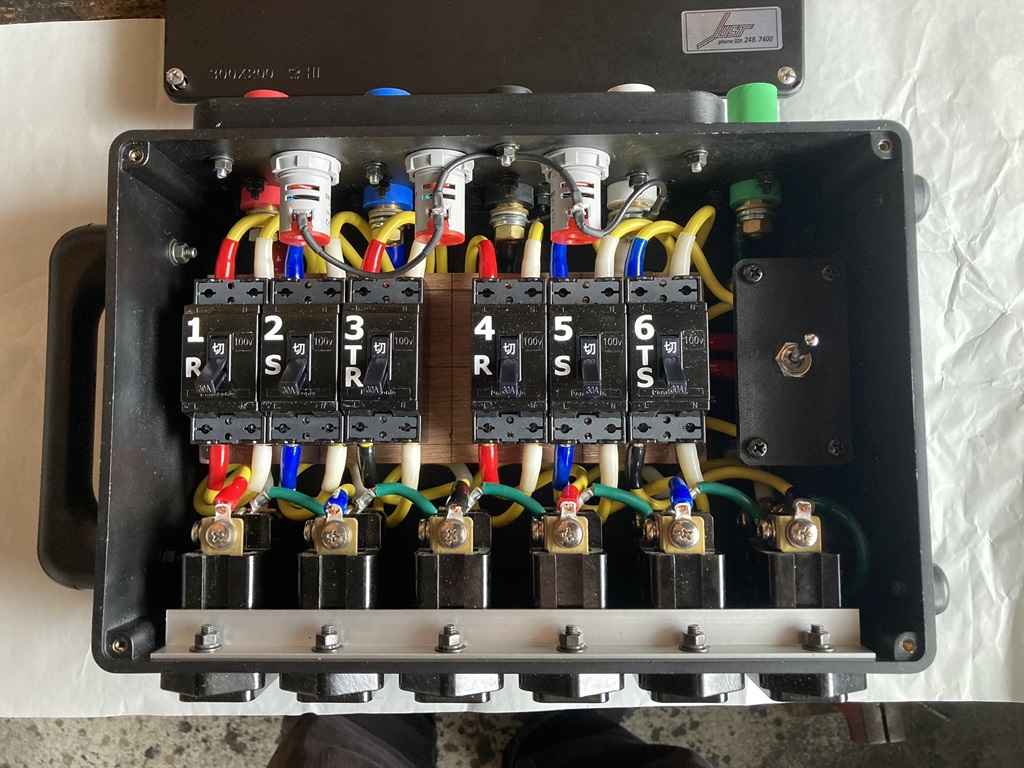
以前から少しずつ作ってきましたが、部品と加工条件が整ったので一気に仕上げてみました。
小規模現場に特化した作りです。2PNCT14sq4芯ミニカムロック(公称60A)の幹線がありますのでこれの専用です。三相四線と単相三線の切り替えは30Aのトグルスイッチです。これを見つけた時はこんな大容量のトグルスイッチがあるのかと驚いた。
大半の現場はC型30Aが6口もあれば事足りますので、汎用性はさておきギリギリまで単純化と小型化をしています。これまでと同じラックマウント形式で作ってもいいのですが、この様式ならラックマウントに比べ1/3の部品代で済みますので廉価版でもあります。パイロットランプを兼ねてパッシブタイプの7ゼクLED電圧計も内蔵しています。
最近は直電の要求が増えてきましたので、コンセントボックスの数を増やすための試作です。
追記
社長から増産の要望が出ました。全6台装備なので追加5台製作です。
手間がかかる品ですから地道に作っていきましょう。
D型20Aを使った200v用も製作予定です。
#器具の製作
入力:ミニカムロック(E1015)/出力:C型30A6口のコンセントボックスです。
以前から少しずつ作ってきましたが、部品と加工条件が整ったので一気に仕上げてみました。
小規模現場に特化した作りです。2PNCT14sq4芯ミニカムロック(公称60A)の幹線がありますのでこれの専用です。三相四線と単相三線の切り替えは30Aのトグルスイッチです。これを見つけた時はこんな大容量のトグルスイッチがあるのかと驚いた。
大半の現場はC型30Aが6口もあれば事足りますので、汎用性はさておきギリギリまで単純化と小型化をしています。これまでと同じラックマウント形式で作ってもいいのですが、この様式ならラックマウントに比べ1/3の部品代で済みますので廉価版でもあります。パイロットランプを兼ねてパッシブタイプの7ゼクLED電圧計も内蔵しています。
最近は直電の要求が増えてきましたので、コンセントボックスの数を増やすための試作です。
追記
社長から増産の要望が出ました。全6台装備なので追加5台製作です。
手間がかかる品ですから地道に作っていきましょう。
D型20Aを使った200v用も製作予定です。
#器具の製作
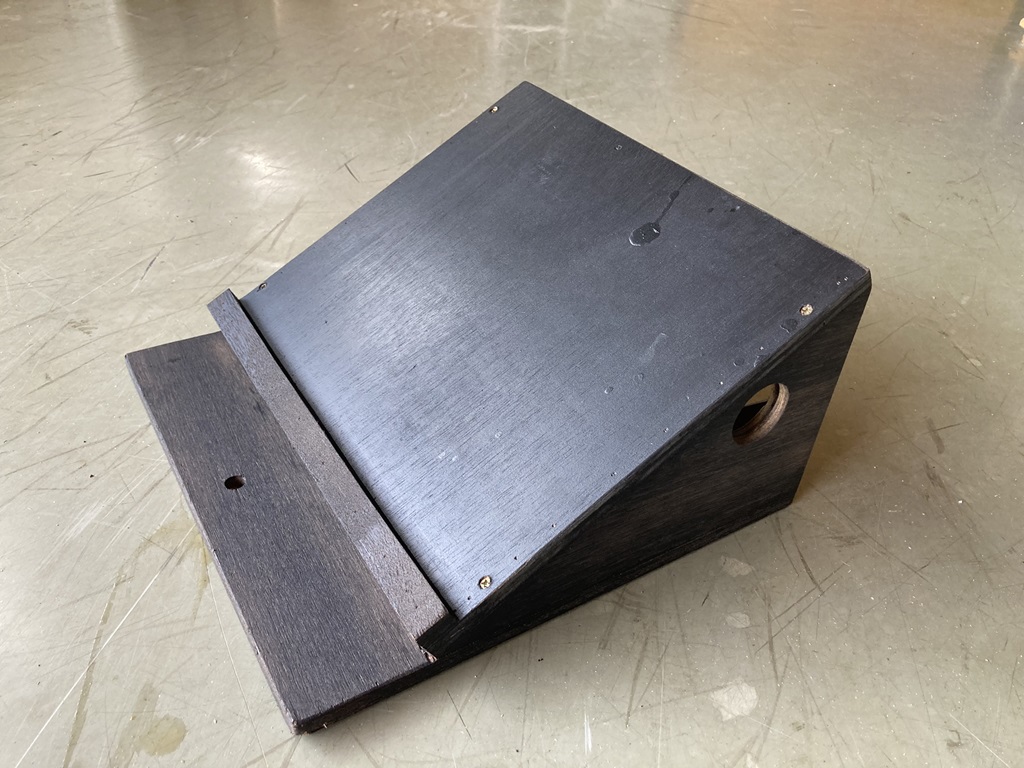
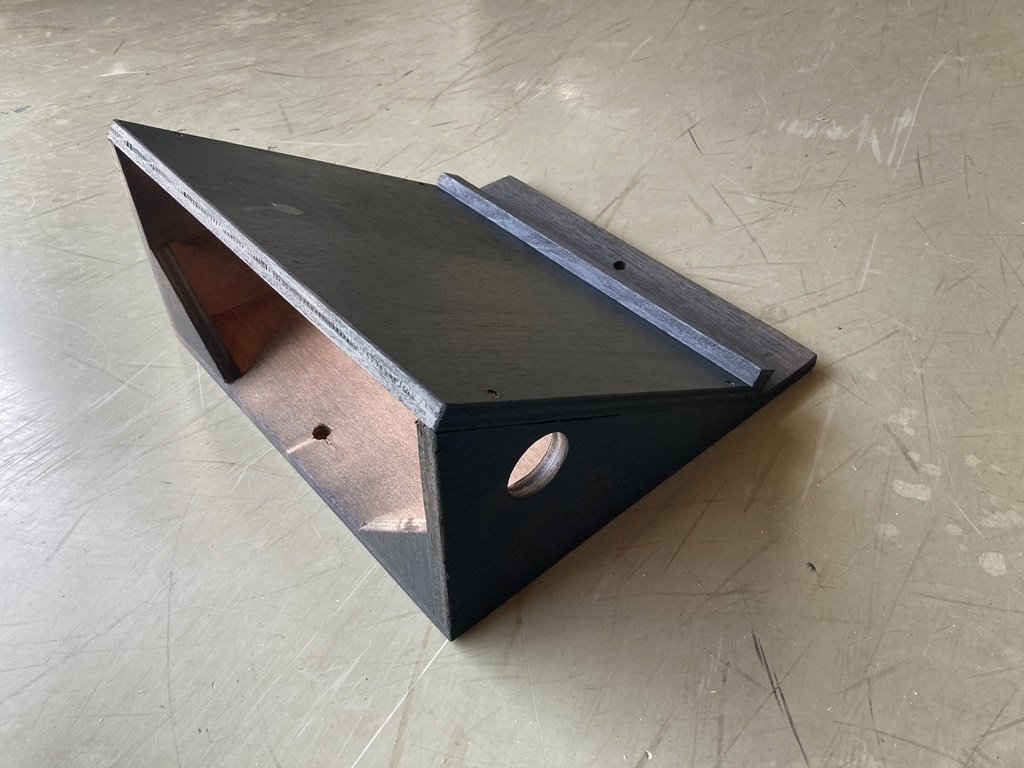
こんなんこさえてみました。ゴールデンウィーク工作その1かな?


単管パイプの端にベアリングを入れフレームに固定した物です。この上でリノリュームを転がして巻を絞めるのです。
リノリュームは巻が緩い状態で保管されると次に敷いた際に波打つので出来るだけキツく巻いた方がいいのですが、お手伝いさんに巻いてもらったりレンタル戻りですと巻が緩いことが多いのが常です。
巻いた状態で10mも転がせば締まるのですが、倉庫で転がせる距離は限られていますのでナンとかならんものかと考えていたのです。
コンベアローラーを使えたらいいのですが、1mもある物は高価だしオーバースペック。規格品のベアリングを見ていたら外径44mmの物がありまして、肉厚1.6mmの単管パイプにスルッと入ります。0.2mmくらい緩いので接着で十分。硬度の高いエポキシ接着剤より柔軟性を持つ弾性接着剤(今回はスーパーX)が良いようです。
ちなみに1.5mm厚910mm幅のNBリュームを使っています。現場の仕上がりとしてはTFリュームなどの2mm厚6尺幅物がいいのですが、専門分野ではないので、1巻を1人で運べるなど搬送条件を優先しています。
#ガチ工作 #舞台の小物
単管パイプの端にベアリングを入れフレームに固定した物です。この上でリノリュームを転がして巻を絞めるのです。
リノリュームは巻が緩い状態で保管されると次に敷いた際に波打つので出来るだけキツく巻いた方がいいのですが、お手伝いさんに巻いてもらったりレンタル戻りですと巻が緩いことが多いのが常です。
巻いた状態で10mも転がせば締まるのですが、倉庫で転がせる距離は限られていますのでナンとかならんものかと考えていたのです。
コンベアローラーを使えたらいいのですが、1mもある物は高価だしオーバースペック。規格品のベアリングを見ていたら外径44mmの物がありまして、肉厚1.6mmの単管パイプにスルッと入ります。0.2mmくらい緩いので接着で十分。硬度の高いエポキシ接着剤より柔軟性を持つ弾性接着剤(今回はスーパーX)が良いようです。
ちなみに1.5mm厚910mm幅のNBリュームを使っています。現場の仕上がりとしてはTFリュームなどの2mm厚6尺幅物がいいのですが、専門分野ではないので、1巻を1人で運べるなど搬送条件を優先しています。
#ガチ工作 #舞台の小物
24tありますと台車の製作は楽です。一枚板として強度は十分ですし、打ち込むネジも長めのを使えるので掛りがいい。側面からネジを打ち込むと割れが入りやすいようですが、これは合板のウィークポイントであって24tの製品でも同じこと。下穴を空けたり、打ち込む際にクランプで抑えたり、ネジは仮止めと思って接着剤を併用したりで解決出来ます。
大事なことは貼り合わせの木工ボンドの塗り方。両面に塗布します。圧着した際に端からはみ出るくらいが目安ですが、下になる面にはたっぷり、上になる面は少な目でいいのですが繊維に馴染ませるイメージで塗り込みます。両面に馴染ませておけば僅かな隙間があって圧着が弱くてもボンドが届きます。
今回の治具は客席テーブルの天板の製作にも使えます。スタイロフォームに薄いラワン合板を貼る方向で考えていますが、これの接着でも使えます。
#ガチ工作
大事なことは貼り合わせの木工ボンドの塗り方。両面に塗布します。圧着した際に端からはみ出るくらいが目安ですが、下になる面にはたっぷり、上になる面は少な目でいいのですが繊維に馴染ませるイメージで塗り込みます。両面に馴染ませておけば僅かな隙間があって圧着が弱くてもボンドが届きます。
今回の治具は客席テーブルの天板の製作にも使えます。スタイロフォームに薄いラワン合板を貼る方向で考えていますが、これの接着でも使えます。
#ガチ工作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131