 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
2022年8月 この範囲を時系列順で読む この範囲をファイルに出力する
どうにも不思議です。
コロナが明けた気配を受けてお仕事が増えていることはありがたいのですが、ほんのりと人任せで無自覚に無責任な話が多すぎます。
丸投げ話ならまだわかるのですが、最下請けに大局的な判断や指示を求めてくる。「察しろよ」というニュアンスを含めて言っているのはわからなくもないのですが、あなたの役回りはなんですかと問いたくもなる。
コロナ前は下請けに対する指示がもっと明快で、それが無茶振りであっても落としどころは分かりやすかった気がします。
なんだかなぁ~
#本業
コロナが明けた気配を受けてお仕事が増えていることはありがたいのですが、ほんのりと人任せで無自覚に無責任な話が多すぎます。
丸投げ話ならまだわかるのですが、最下請けに大局的な判断や指示を求めてくる。「察しろよ」というニュアンスを含めて言っているのはわからなくもないのですが、あなたの役回りはなんですかと問いたくもなる。
コロナ前は下請けに対する指示がもっと明快で、それが無茶振りであっても落としどころは分かりやすかった気がします。
なんだかなぁ~
#本業
所属会社の社屋から撮影。

あまりに空がキレイだったので。
見た通り、田舎なんすよ。
手前の青々としたのは田んぼです。草原っちゃ草原?。
#雑談
あまりに空がキレイだったので。
見た通り、田舎なんすよ。
手前の青々としたのは田んぼです。草原っちゃ草原?。
#雑談
中国に発注した基板2種は発送されたそうです。早すぎ。
土曜日にオーダーして火曜日発送、月曜日にオーダーして水曜日発送。
搬送はDHL。先付物件はすでに日本国内に入ったとのこと。つまり、発送翌日には日本国内。
うーん、部品の手配が追いついてないぞ。
#電子工作
土曜日にオーダーして火曜日発送、月曜日にオーダーして水曜日発送。
搬送はDHL。先付物件はすでに日本国内に入ったとのこと。つまり、発送翌日には日本国内。
うーん、部品の手配が追いついてないぞ。
#電子工作
LCD Monitor Controller の基板を中国に発注しました。
試してもいない回路を発注するのはどうかって話もありますが、感光基板で自作するには密度があり過ぎますし、間違いがあっても許せる金額だからいいかなと。
そんな品物、PICに与えるクロックを内蔵のRC発振子か外付け発振子で8MHzにしようかと思っていたのですが7.3728MHzにしようかと。
一見半端な数値ですが、PICでRS232系のシリアル通信でありがちなボーレート(例えば9600bps)などを扱うならキリがいいのです。計算上ですがエラー率が0%になります。
目的のLCDモニタは単純なパラレルなので厳密な時間管理は不要だし、I2Cはクロック同期式のスレーブなのでタイミングはマスター任せです。しかし、シリアル通信は非同期なので受信側もボーレートを合わせなければなりません。PICはシステムクロックでボーレートを起こしますので、他に支障を来さない範囲でシリアル通信に都合の良いシステムクロックを使った方がいいのです。
これまでは国内の販売店で7.3728MHzの水晶発振子を見つけられなかったので使っていませんでしたが、試しに中国で探したら普通にあります。1個59円と安いので買っておきました。例によって送料の方が高い。。。
シリアル通信に都合が良いクロックは他にもありますが、この値を使うのはPICの都合です。16系PICのクロックは32MHzが上限で、そのままのクロックを与えてもいいのですが、内蔵の4倍PLLを使えば8MHzを与えることで32MHzで動作します。PLLを使った方が外部ノイズに強いのもありますから、8MHz以下でシリアル通信に都合が良い最大値である7.3728MHzはよろしいのです。
同じ理由で、PICでDMXを扱うなら250kHzの二乗数倍がよろしいのです。
#電子工作
試してもいない回路を発注するのはどうかって話もありますが、感光基板で自作するには密度があり過ぎますし、間違いがあっても許せる金額だからいいかなと。
そんな品物、PICに与えるクロックを内蔵のRC発振子か外付け発振子で8MHzにしようかと思っていたのですが7.3728MHzにしようかと。
一見半端な数値ですが、PICでRS232系のシリアル通信でありがちなボーレート(例えば9600bps)などを扱うならキリがいいのです。計算上ですがエラー率が0%になります。
目的のLCDモニタは単純なパラレルなので厳密な時間管理は不要だし、I2Cはクロック同期式のスレーブなのでタイミングはマスター任せです。しかし、シリアル通信は非同期なので受信側もボーレートを合わせなければなりません。PICはシステムクロックでボーレートを起こしますので、他に支障を来さない範囲でシリアル通信に都合の良いシステムクロックを使った方がいいのです。
これまでは国内の販売店で7.3728MHzの水晶発振子を見つけられなかったので使っていませんでしたが、試しに中国で探したら普通にあります。1個59円と安いので買っておきました。例によって送料の方が高い。。。
シリアル通信に都合が良いクロックは他にもありますが、この値を使うのはPICの都合です。16系PICのクロックは32MHzが上限で、そのままのクロックを与えてもいいのですが、内蔵の4倍PLLを使えば8MHzを与えることで32MHzで動作します。PLLを使った方が外部ノイズに強いのもありますから、8MHz以下でシリアル通信に都合が良い最大値である7.3728MHzはよろしいのです。
同じ理由で、PICでDMXを扱うなら250kHzの二乗数倍がよろしいのです。
#電子工作
コロナの反動で5月から7月の中旬まで忙しくさせて頂きましたが、例年なら夏祭りが続く8月上旬が中止の多発で少し空きました。
このところ基板を書きまくっているのは時間が取れたのと秋の現場に向けて作っておかねばならない案件だからです。
それにしてもKiCADは慣れると素晴らしく使いやすいです。基板CAD全般が持つ独特の風味に違和感を感じるところはありますが、CADLUS-Xは覚えるのに数か月かかったのに対して数時間です。CADLUS-Xで基板CADの流儀を覚えたからかもしれませんけどね。
KiCADの良い所は、回路図と基板がリンクしていることです。自動ではありませんが回路図の修正がワンクリックで基板に反映されます。やったことはありませんが、基板を修正して回路図に反映することも出来るようです。CADLUS-Xではこれが出来なかったので大きな変更が出ると大変でした。
また、3Dビューもいいですね。単にそれを見て楽しむのもいいですが、シルクの仕上がり具合いと部品の干渉を確認出来るのがいい。ガーバーデータのビュワーもシームレスに使えますので、入稿データを2つの手段で確認出来るのは校正手段としてとてもありがたい。
ver6になって「シュミレーター」というメニュー項目を見つけました。以前からあったのかもしれませんし、まだ試していませんが、回路シュミレーターのSpiceなどを当てられるとしたらこれは凄いです。Spiceは少し扱いが面倒ですが、条件を整えてあげるとどの端子にどういう波形が出るかを確認出来るので、特にアナログ回路を作る際には初期確認として便利です。もっとも、私が組むアナログ回路ならSpiceをセッティングするよりブレッドボードで仮組みしてオシロを眺めた方が短時間で済むのですけどね。
漠然とした気持ちを汲んで作ってくれるほど優しくありませんが、回路図からガーバーデータまで一貫した作業環境を提供してくれるKiCADは素晴らしいの一言です。
ちなみに基板とは層を成した板切れです。ガーバーデータはどの層にどんな形を描くかを指示するデータですので、基板の層の構成とそれに対応したレイヤーの名前の関係性を理解すればイラストレーターに馴染んだ人なら描くことは難しくないと思います。実際の層とデータレイヤーの関係には暗黙の縛りがあり、作者が勝手に決めることはまず無いってだけです。この辺りを丁寧に説明してくれている情報が皆無なので取っ付き難いのはあります。
工程としては、回路図作成、基板デザイン、ガーバーデータ作成、入稿となりますが、基板製作を学ぶには逆順で理解していくといいのかもしれません。
#CAD #電子工作
このところ基板を書きまくっているのは時間が取れたのと秋の現場に向けて作っておかねばならない案件だからです。
それにしてもKiCADは慣れると素晴らしく使いやすいです。基板CAD全般が持つ独特の風味に違和感を感じるところはありますが、CADLUS-Xは覚えるのに数か月かかったのに対して数時間です。CADLUS-Xで基板CADの流儀を覚えたからかもしれませんけどね。
KiCADの良い所は、回路図と基板がリンクしていることです。自動ではありませんが回路図の修正がワンクリックで基板に反映されます。やったことはありませんが、基板を修正して回路図に反映することも出来るようです。CADLUS-Xではこれが出来なかったので大きな変更が出ると大変でした。
また、3Dビューもいいですね。単にそれを見て楽しむのもいいですが、シルクの仕上がり具合いと部品の干渉を確認出来るのがいい。ガーバーデータのビュワーもシームレスに使えますので、入稿データを2つの手段で確認出来るのは校正手段としてとてもありがたい。
ver6になって「シュミレーター」というメニュー項目を見つけました。以前からあったのかもしれませんし、まだ試していませんが、回路シュミレーターのSpiceなどを当てられるとしたらこれは凄いです。Spiceは少し扱いが面倒ですが、条件を整えてあげるとどの端子にどういう波形が出るかを確認出来るので、特にアナログ回路を作る際には初期確認として便利です。もっとも、私が組むアナログ回路ならSpiceをセッティングするよりブレッドボードで仮組みしてオシロを眺めた方が短時間で済むのですけどね。
漠然とした気持ちを汲んで作ってくれるほど優しくありませんが、回路図からガーバーデータまで一貫した作業環境を提供してくれるKiCADは素晴らしいの一言です。
ちなみに基板とは層を成した板切れです。ガーバーデータはどの層にどんな形を描くかを指示するデータですので、基板の層の構成とそれに対応したレイヤーの名前の関係性を理解すればイラストレーターに馴染んだ人なら描くことは難しくないと思います。実際の層とデータレイヤーの関係には暗黙の縛りがあり、作者が勝手に決めることはまず無いってだけです。この辺りを丁寧に説明してくれている情報が皆無なので取っ付き難いのはあります。
工程としては、回路図作成、基板デザイン、ガーバーデータ作成、入稿となりますが、基板製作を学ぶには逆順で理解していくといいのかもしれません。
#CAD #電子工作

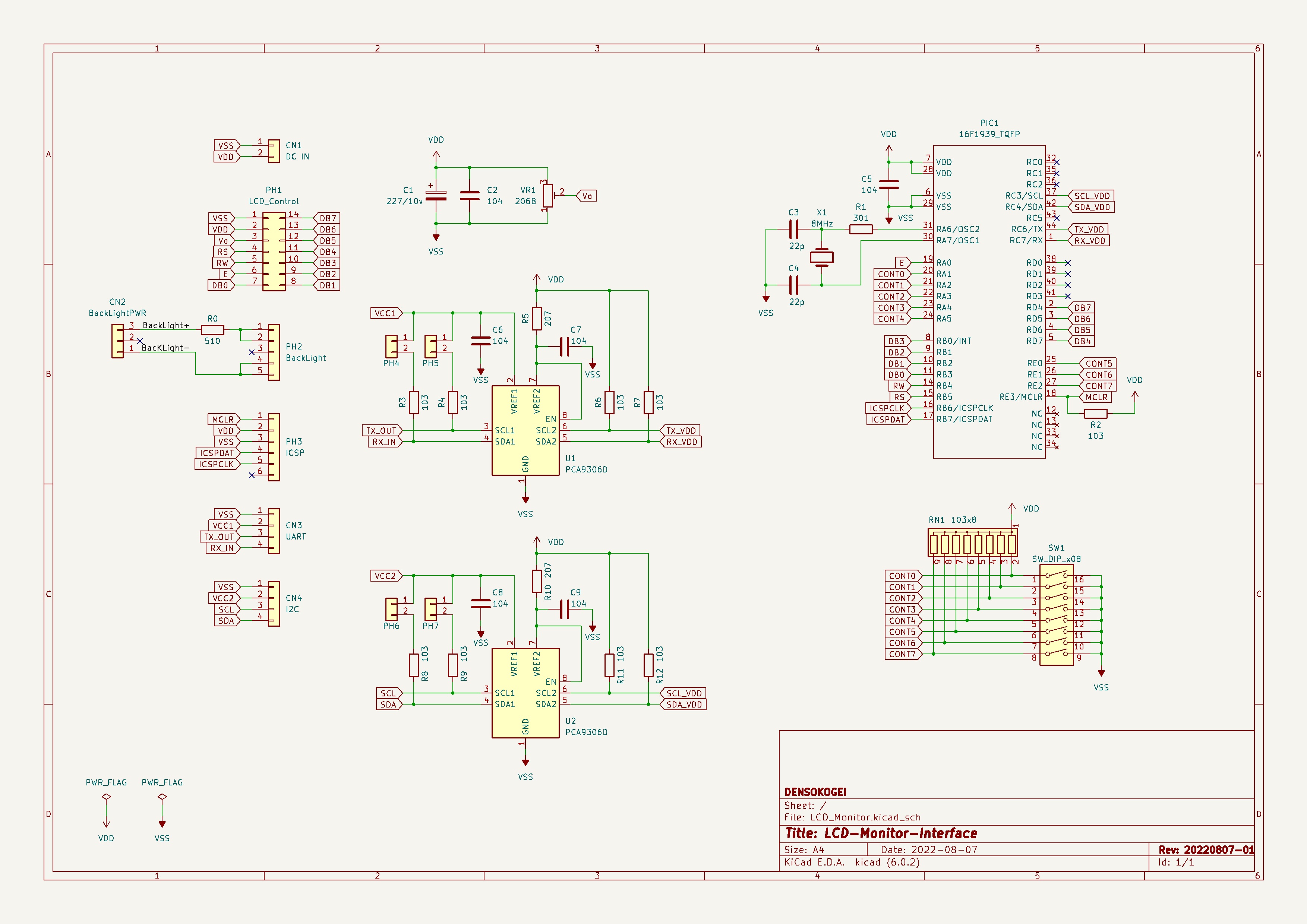
LCDモニタモジュールをI2CやSerialで制御する補助基板を書いてみました。
制御チップがSC2004の「LCDキャラクタディスプレイモジュール 20×4行」用です。
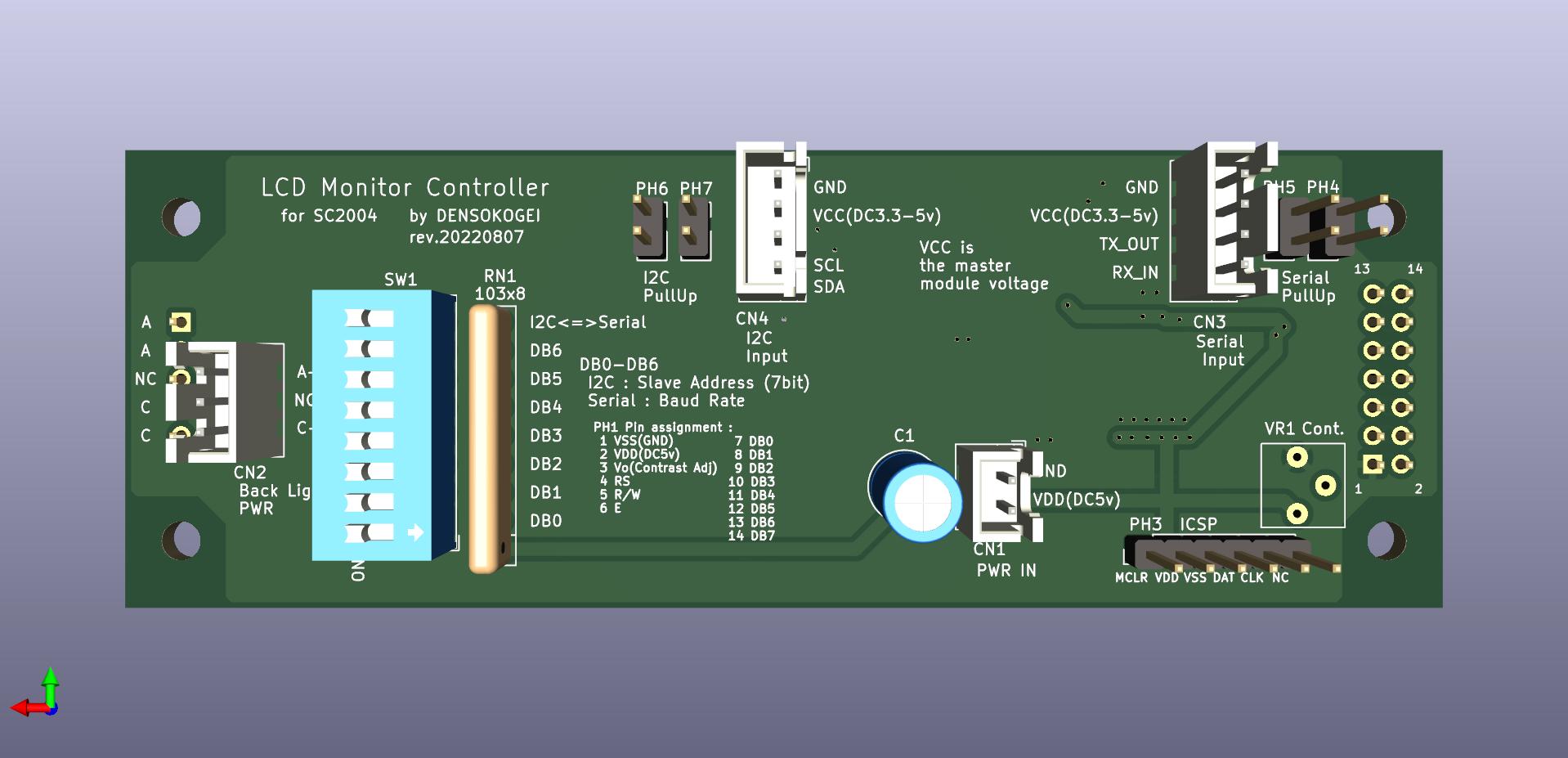
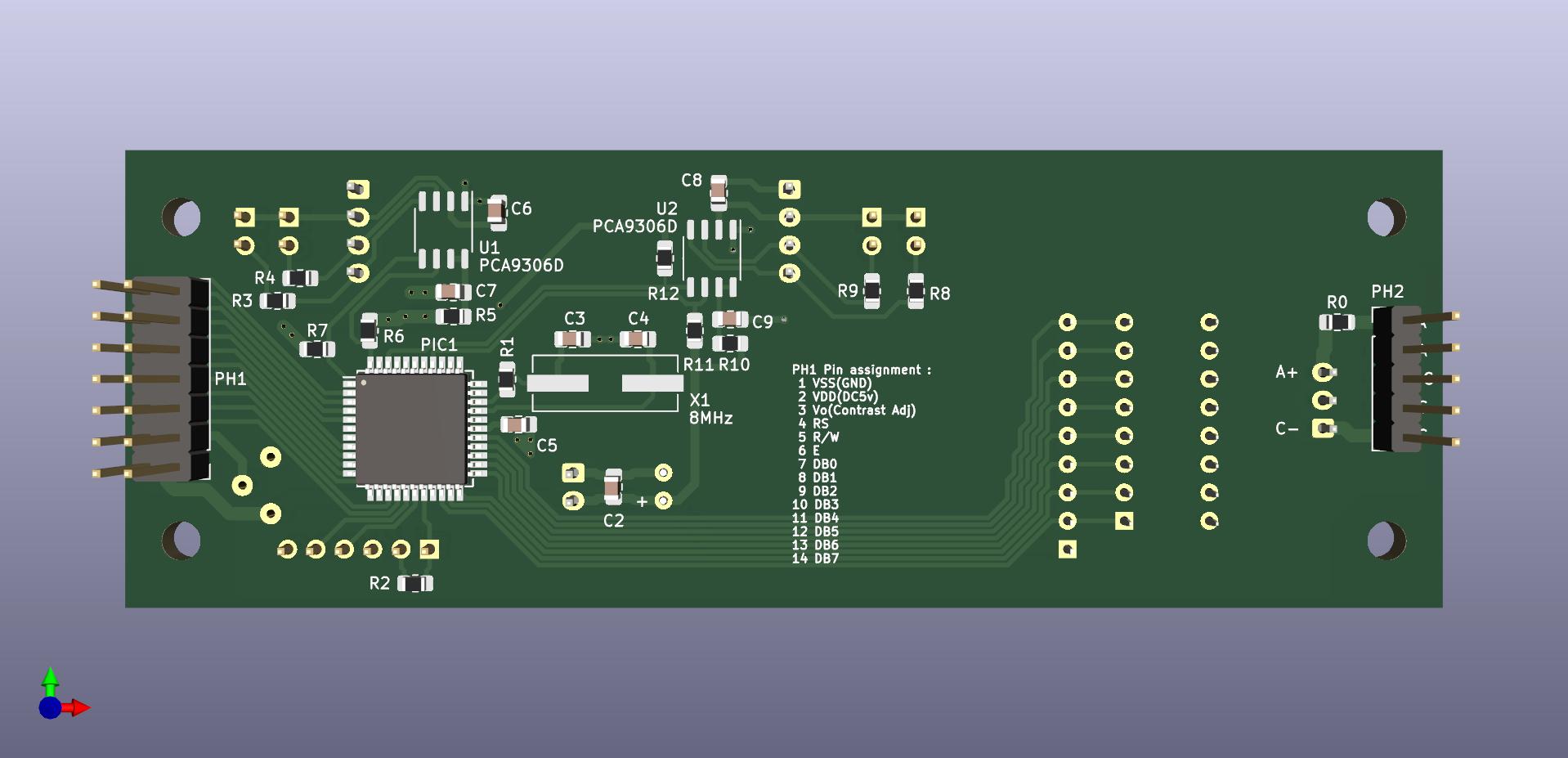
LCDの裏側から挿して使います。
ちょっと面倒なパラレル制御なのをI2CやSerialでANSIエスケープシーケンスっぽい制御が出来る様にします。
補助的な品物ですが、これがあると製作が楽になります。
ちなみに、信号の電圧変換とバッファを兼ねてPCA9306Dを入れています。LCDは5v制御ですがRaspberryPiなどは3.3vだからです。
そういや手首は痛くありません。アームレストのおかげ?
作業姿勢は大事ですね。
#電子工作
制御チップがSC2004の「LCDキャラクタディスプレイモジュール 20×4行」用です。
LCDの裏側から挿して使います。
ちょっと面倒なパラレル制御なのをI2CやSerialでANSIエスケープシーケンスっぽい制御が出来る様にします。
補助的な品物ですが、これがあると製作が楽になります。
ちなみに、信号の電圧変換とバッファを兼ねてPCA9306Dを入れています。LCDは5v制御ですがRaspberryPiなどは3.3vだからです。
そういや手首は痛くありません。アームレストのおかげ?
作業姿勢は大事ですね。
#電子工作
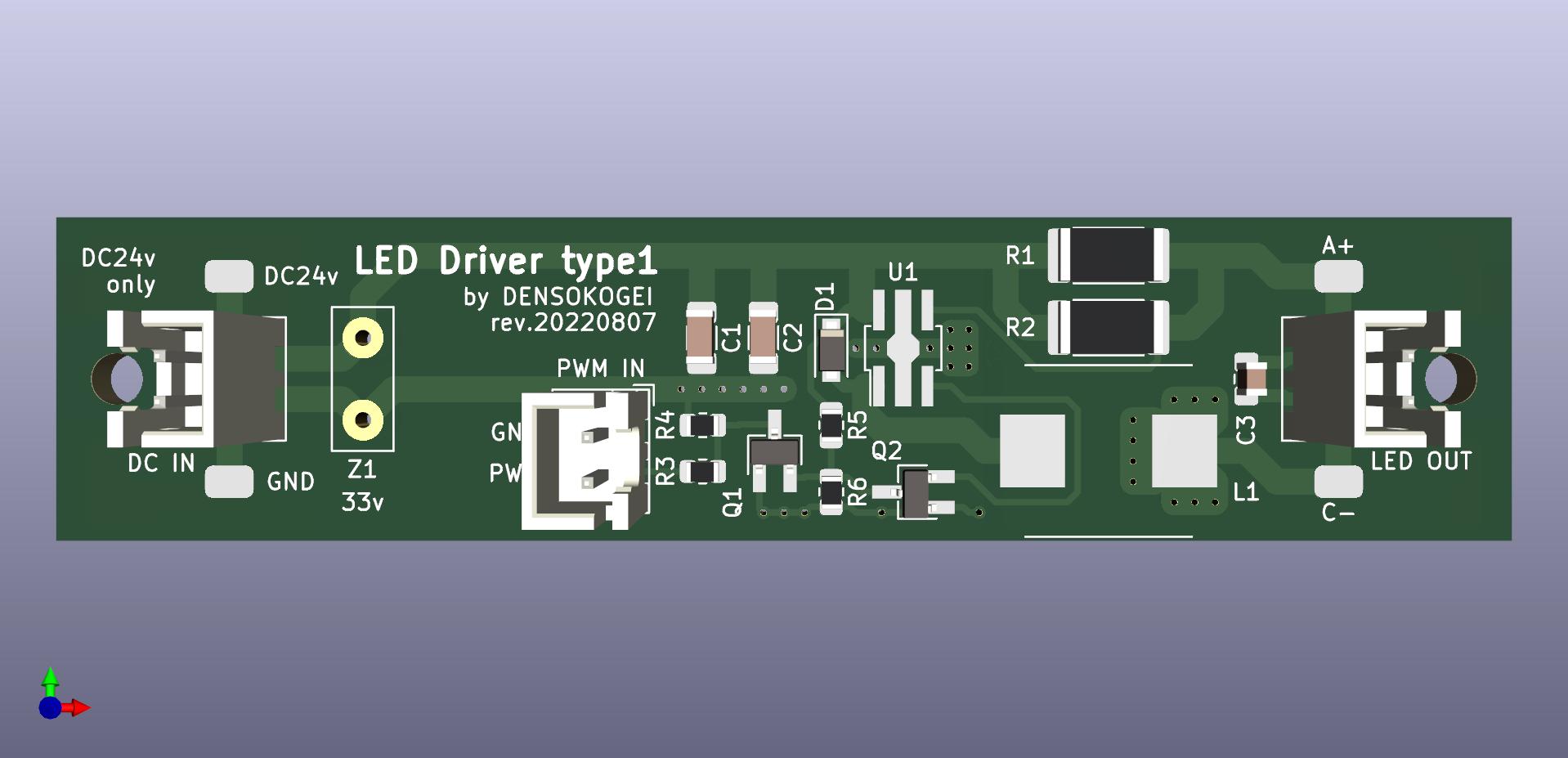
LED-BARのオプションです。

手持ちのLED-BARは広がりがあるのでジョーゼット幕などを染めるのに便利に使えますが、LHQの代替にするにはもう少し広がって欲しい。
中華電器のレンズ (ここのφ38の物)を試したところいい感じに拡散しました。LED-BARのリフレクタタイプのレンズの前にかざします。
このレンズは平凸レンズですが、平側に小さなレンズが沢山付いている構成です。エッジが柔らかくなり、カラーミックスでありがちな色むらが軽減されます。
照度は1/4くらいに落ちますが、エッジが無くなり広く柔らかい光です。今のところレンズが1本分しかありませんのでLHとしての評価は出来ていませんが、たぶん使えると思います。
レンズをハメている黒いのは3Dプリンタで出力したものです。
これをLED-BARに被せて使います。
手持ちのプリンタですとLED3発か4発分のサイズしかプリント出来ませんが、3発なら3個同時にプリント出来ますし、LED-BARの制御単位は3発なので都合がいいようです。
#照明器具 #LED
手持ちのLED-BARは広がりがあるのでジョーゼット幕などを染めるのに便利に使えますが、LHQの代替にするにはもう少し広がって欲しい。
中華電器のレンズ (ここのφ38の物)を試したところいい感じに拡散しました。LED-BARのリフレクタタイプのレンズの前にかざします。
このレンズは平凸レンズですが、平側に小さなレンズが沢山付いている構成です。エッジが柔らかくなり、カラーミックスでありがちな色むらが軽減されます。
照度は1/4くらいに落ちますが、エッジが無くなり広く柔らかい光です。今のところレンズが1本分しかありませんのでLHとしての評価は出来ていませんが、たぶん使えると思います。
レンズをハメている黒いのは3Dプリンタで出力したものです。
これをLED-BARに被せて使います。
手持ちのプリンタですとLED3発か4発分のサイズしかプリント出来ませんが、3発なら3個同時にプリント出来ますし、LED-BARの制御単位は3発なので都合がいいようです。
#照明器具 #LED
昨日こさえたアームレストは良い感じです。
一晩経過して思ったのですが、ニスの硬化が明らかに早い。
今までは原液のまま塗って完全に硬化するのに2-3日かかっていましたが、今回は20%くらいの希釈で24時間で完全に硬化しています。
猛暑で気温が高いのもあるかもしれませんが、水を足した方が早いのも不思議な気がします。原液のままですと表面が先に固まって中が固まらないのでしょうか。
正直言いますと、少し前に作った品でニスが足りない感じだったので水でカサ増ししたのが最初です。カスが落ちない程度に目止めになればと塗ったのですが、僅かな不足のために新品買うのもなぁ~というケチ心が由来です。面白い結果が出たので良かったのですが。
#ガチ工作
一晩経過して思ったのですが、ニスの硬化が明らかに早い。
今までは原液のまま塗って完全に硬化するのに2-3日かかっていましたが、今回は20%くらいの希釈で24時間で完全に硬化しています。
猛暑で気温が高いのもあるかもしれませんが、水を足した方が早いのも不思議な気がします。原液のままですと表面が先に固まって中が固まらないのでしょうか。
正直言いますと、少し前に作った品でニスが足りない感じだったので水でカサ増ししたのが最初です。カスが落ちない程度に目止めになればと塗ったのですが、僅かな不足のために新品買うのもなぁ~というケチ心が由来です。面白い結果が出たので良かったのですが。
#ガチ工作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131