 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
2023年5月 この範囲を時系列順で読む この範囲をファイルに出力する
LTC Generator の基板をハンダ付け。
表面実装部品の取り付けはオーブントースターを用いたリフローです。手順が決まれば簡単です。
リフローに関する過去記事
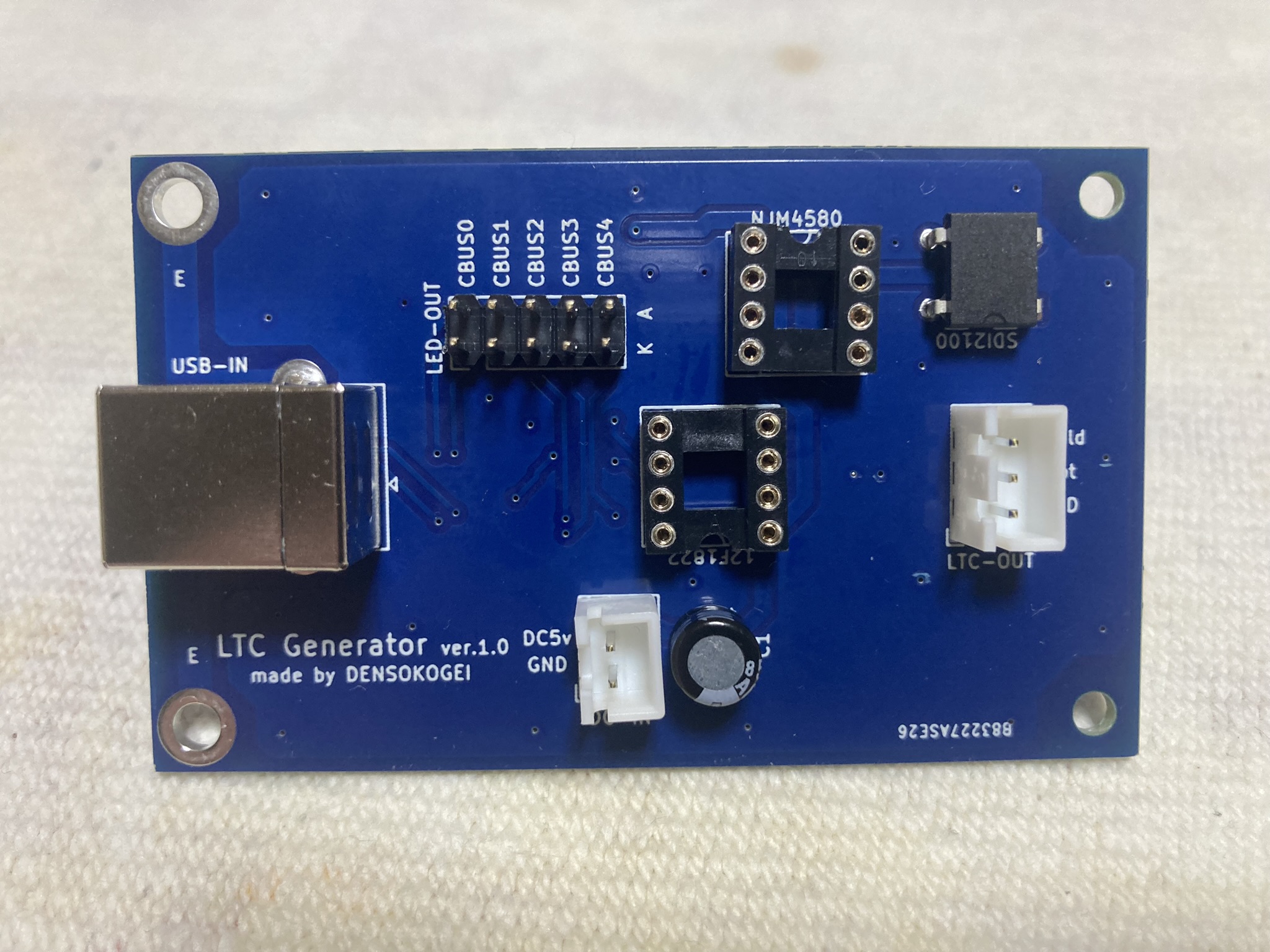
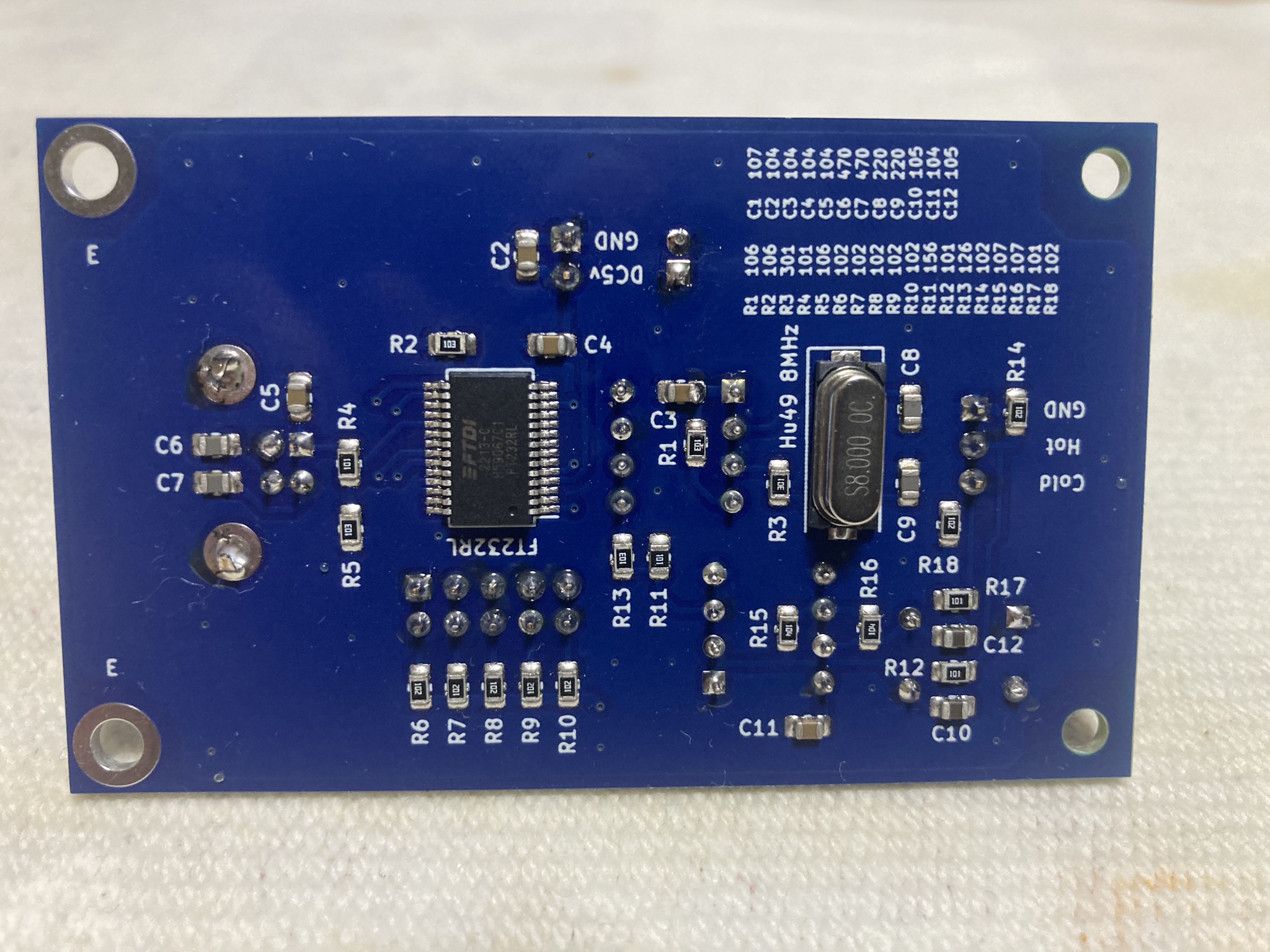
当たり前ですが、KiCADで描いた3D図のままです。
Windows11がCOMとして認識しましたので、Pythonでシリアル通信が出来るハズです。
この後はPICのファームウェアを書きます。MPLABX-IDEも使えるようにしましたので地道に書いていきます。
基板に書いた抵抗値が一部間違ってました。
データは修正しましたが、次の製作では注意が必要です。
#電子工作 #器具の製作 #タイムコード
表面実装部品の取り付けはオーブントースターを用いたリフローです。手順が決まれば簡単です。
リフローに関する過去記事
当たり前ですが、KiCADで描いた3D図のままです。
Windows11がCOMとして認識しましたので、Pythonでシリアル通信が出来るハズです。
この後はPICのファームウェアを書きます。MPLABX-IDEも使えるようにしましたので地道に書いていきます。
基板に書いた抵抗値が一部間違ってました。
データは修正しましたが、次の製作では注意が必要です。
#電子工作 #器具の製作 #タイムコード
DI-1の音が小さくなった原因というか対策ですが、7vくらいになっていた9v電池を新品にしたら治りました。
ファンタム電源で動かしていたので電池は無関係だと思ったのですが・・・。古い機体だから電池の扱いが違うのかな?オペアンプがよくない方向に行ったワケでないことを確認できたのでヨシとしましょう。
現状の音ですが、DI-1特有の高域がモッサリする感じが無くなり、スッキリと上まで伸びて音像は明瞭ですが、どことなく安っぽい音に感じるかもしれません。高域が良くなった半面、中域が細くなって音の分離が弱くなった印象です。手間ヒマお金をかけて改造するレベルかは微妙。
300時間として残り200時間。。。。
#音の世界
ファンタム電源で動かしていたので電池は無関係だと思ったのですが・・・。古い機体だから電池の扱いが違うのかな?オペアンプがよくない方向に行ったワケでないことを確認できたのでヨシとしましょう。
現状の音ですが、DI-1特有の高域がモッサリする感じが無くなり、スッキリと上まで伸びて音像は明瞭ですが、どことなく安っぽい音に感じるかもしれません。高域が良くなった半面、中域が細くなって音の分離が弱くなった印象です。手間ヒマお金をかけて改造するレベルかは微妙。
300時間として残り200時間。。。。
#音の世界
PICのファームウェアを書くのは久しぶりなので最新版のMPLABX-IDEをインストールしました。現時点でv6.10です。
しかし、MPASMが入っていません。アセンブルするためのツールですが、これが無ければアセンブラソースが扱えません。
こりゃ困った。
ネットを徘徊したところ、MPASMが入っているのはv5.35までとのこと。v5.40以降はXC8(Cコンパイラ)のアセンブラを使えってことみたいです。
追記
v5.35をインストールしましたが、MPASMは64bitOSでは使えませんときた。
アセンブルは実行されるのに警告が出ます。
今は動いても将来的に問題がありそうなので、XC8のアセンブラを使うことにします。
追記
MPLABX-IDEはv6.10、XC8はv2.41、アセンブラはXC8のPIC-asにしました。書式が少し違うだけで要領がわかれば簡単です。MPASMをMPLABX-IDEで使っている方なら、細かい設定は先達のサイトを検索して頂けば解決すると思います。
こちらのサイト「XC8 アセンブラの使い方 1(MPASM 移行)」が参考になりました。
私が以前のソースを変更したのは次の3点です。
1)ラベル文字列の最後にコロン「:」を付ける。
2)数値書式を変更。
3)ORGで指定していた開始アドレスの指定方法を変更。
PICの動作は確認していませんが、アセンブルは正常終了しました。
コンフィゲーションビットの設定はソースコードに記述するのがXC8の流儀みたいです。
#電子工作
しかし、MPASMが入っていません。アセンブルするためのツールですが、これが無ければアセンブラソースが扱えません。
こりゃ困った。
ネットを徘徊したところ、MPASMが入っているのはv5.35までとのこと。v5.40以降はXC8(Cコンパイラ)のアセンブラを使えってことみたいです。
追記
v5.35をインストールしましたが、MPASMは64bitOSでは使えませんときた。
アセンブルは実行されるのに警告が出ます。
今は動いても将来的に問題がありそうなので、XC8のアセンブラを使うことにします。
追記
MPLABX-IDEはv6.10、XC8はv2.41、アセンブラはXC8のPIC-asにしました。書式が少し違うだけで要領がわかれば簡単です。MPASMをMPLABX-IDEで使っている方なら、細かい設定は先達のサイトを検索して頂けば解決すると思います。
こちらのサイト「XC8 アセンブラの使い方 1(MPASM 移行)」が参考になりました。
私が以前のソースを変更したのは次の3点です。
1)ラベル文字列の最後にコロン「:」を付ける。
2)数値書式を変更。
3)ORGで指定していた開始アドレスの指定方法を変更。
PICの動作は確認していませんが、アセンブルは正常終了しました。
コンフィゲーションビットの設定はソースコードに記述するのがXC8の流儀みたいです。
#電子工作
エージングについて先達のご意見を拝見すると、対象がプリアンプ、パワーアンプ、スピーカーによっても違いますが、概ね次の様な手順が多い感じがしました。
1)通電して無音状態を維持。
2)負荷に適切なノイズを当てる。
3)音源を通す。
といった感じです。
機械の慣らし運転という意味では納得できる手順ですが、悪い言い方をするなら俺様仕様で行うことですから正解があるようで無いのかもしれません。
ただ間違いないことは、使い始めは時間と共に特性が変化していることです。劣化なのか仕上げなのかは扱う人の考え方次第ですが、特定の手段でその時間を経過させるとその後の安定期が良い状態になるならその方法は得たいものです。
ここまで音楽を通してきましたが、ロジックな手段ならピンクノイズかなと思い、90時間経過で音源を差し替えてみました。
途中で交換すると今後の参考にならないような気もするのですが、このまま音楽を通してもダメな気がするのです。
#音の世界
1)通電して無音状態を維持。
2)負荷に適切なノイズを当てる。
3)音源を通す。
といった感じです。
機械の慣らし運転という意味では納得できる手順ですが、悪い言い方をするなら俺様仕様で行うことですから正解があるようで無いのかもしれません。
ただ間違いないことは、使い始めは時間と共に特性が変化していることです。劣化なのか仕上げなのかは扱う人の考え方次第ですが、特定の手段でその時間を経過させるとその後の安定期が良い状態になるならその方法は得たいものです。
ここまで音楽を通してきましたが、ロジックな手段ならピンクノイズかなと思い、90時間経過で音源を差し替えてみました。
途中で交換すると今後の参考にならないような気もするのですが、このまま音楽を通してもダメな気がするのです。
#音の世界
エージングは85時間経過。改めて無改造品と比べてみました。
ところが、比べる以前に出力が弱くなっています。
計測はしていませんが、聴感で半分くらい。ケーブル等の接続に異常ありませんし、無改造品に使っているケーブルと差し替えても改善しません。
何が起こったのでしょう。
かなり年数を経た機体ですのでエージングの連続運転で寿命が表に出たのか、MUSESはそういうモノなのか、現時点では何とも言えません。
思い起こせば、昨晩のチェックでも出力が少し小さくなっていたかもしれません。
そんな作業で気づいたのですが、無改造品の音が良くなっています。この機体はNJM4580Dのエージングの際に比較用として一緒に12時間動かしたものです。
私のバカ耳基準ですが、DI-1にありがちな高域の詰まりが減っています。総合的にはMUSES01Dの方が良い音ですが、現時点では出力が小さくなっていることもあり、無改造品の音質向上に耳が行ってしまいます。
無改造品というか純正状態に連続運転というエージングを施すことで音が良くなるならそれに越したことはありませんので、これはこれで経過観察です。
#音の世界
ところが、比べる以前に出力が弱くなっています。
計測はしていませんが、聴感で半分くらい。ケーブル等の接続に異常ありませんし、無改造品に使っているケーブルと差し替えても改善しません。
何が起こったのでしょう。
かなり年数を経た機体ですのでエージングの連続運転で寿命が表に出たのか、MUSESはそういうモノなのか、現時点では何とも言えません。
思い起こせば、昨晩のチェックでも出力が少し小さくなっていたかもしれません。
そんな作業で気づいたのですが、無改造品の音が良くなっています。この機体はNJM4580Dのエージングの際に比較用として一緒に12時間動かしたものです。
私のバカ耳基準ですが、DI-1にありがちな高域の詰まりが減っています。総合的にはMUSES01Dの方が良い音ですが、現時点では出力が小さくなっていることもあり、無改造品の音質向上に耳が行ってしまいます。
無改造品というか純正状態に連続運転というエージングを施すことで音が良くなるならそれに越したことはありませんので、これはこれで経過観察です。
#音の世界
昨日オフでしたが、用事が終わらず趣味の工作は断念。
現場へ出向く前にエージングの具合いを確認しました。約60時間経過。またしても音が変わっています。
膨らみが上に伸び、音の質量を感じられるのは良点ですが、どこか歪んでいる印象を受けます。いわゆるオーバーロードで歪んでいるのではなく、倍音の質によって伸びたり詰まったりを繰り返すために歪んでいるように聴こえる印象です。
全体としては良い方向に変化していると思いますし、ガットギターのソロの曲は特に良くなっていますが、今の状態が落としどころだったら微妙ですね。
追記
現場から戻ってエージングを確認。70時間経過です。
奇妙な歪み感は無くなり、高域が伸びてしました。肉厚な色っぽさが出始めたかも。
#音の世界
現場へ出向く前にエージングの具合いを確認しました。約60時間経過。またしても音が変わっています。
膨らみが上に伸び、音の質量を感じられるのは良点ですが、どこか歪んでいる印象を受けます。いわゆるオーバーロードで歪んでいるのではなく、倍音の質によって伸びたり詰まったりを繰り返すために歪んでいるように聴こえる印象です。
全体としては良い方向に変化していると思いますし、ガットギターのソロの曲は特に良くなっていますが、今の状態が落としどころだったら微妙ですね。
追記
現場から戻ってエージングを確認。70時間経過です。
奇妙な歪み感は無くなり、高域が伸びてしました。肉厚な色っぽさが出始めたかも。
#音の世界
丸一日現場でしたので新たなネタはありませんが、エージングの進捗など。
30時間経過ですが、音が膨らむ周波数帯域が広くなってきました。12時間経過では500-700Hzくらいが膨らんでいましたが、それが上に広がり、今は1kHz近くまで伸びている感じです。特に印象に残ったのはウッドベースのゴリゴリ感が生々しさを増していることです。エージング開始直後のキラキラした感じも良い印象でしたが、今と比べたら青臭くて薄い音だったかもしれません。今は楽器の「香り」がしてきそうです。
時間の経過と共に明らかに良い方向に変化していますので、300時間とも言われるエージングでどうなっていくのか楽しみです。
#音の世界
30時間経過ですが、音が膨らむ周波数帯域が広くなってきました。12時間経過では500-700Hzくらいが膨らんでいましたが、それが上に広がり、今は1kHz近くまで伸びている感じです。特に印象に残ったのはウッドベースのゴリゴリ感が生々しさを増していることです。エージング開始直後のキラキラした感じも良い印象でしたが、今と比べたら青臭くて薄い音だったかもしれません。今は楽器の「香り」がしてきそうです。
時間の経過と共に明らかに良い方向に変化していますので、300時間とも言われるエージングでどうなっていくのか楽しみです。
#音の世界
MUSES01Dのエージングを始めて12時間、中域が膨らみました。その影響なのか若干モコモコした印象です。輪郭や余韻が失われたワケではありませんので、高域まで膨らんでくれたらいいのかな。先の書き込みで「いかにもJRC」と表現した感じは薄まっています。
#音の世界
#音の世界
MUSES01Dが入荷したので我慢出来ず実験。
エージングが済んでいないのにNJM4580Dよりも圧倒的に良い音です。良い音の基準は難しいですが、第一印象は重なって隠れてしまう音が一つも感じられないことです。今まで聞こえなかった音が聴こえるとか、音の向こうの無音まで聴こえてきそうだと書いたら大げさですがそんな感じ。ジャズっぽい音源で試していますが、主旋律は勿論、僅かに入っている伴奏の輪郭や余韻まで明瞭に聴こえ、NJM4580Dではあまり聴こえなかったスネアのブラシにまで存在感があります。粒立ちが良く透明感があるとでも書けばオーディオ評論っぽい?
いかにもJRCの音なのは否定しませんが、これ以上は自分のバカ耳では評価不能かも。凄いの一言です。ちょっと聴いただけで「良い音ぢゃね!?」と思ってもらえるレベルだと思います。
バンドモノの現場で楽器を繋いで試してみたいです。ベースはもちろん、キーボードの音も圧倒的に良くなりそうな期待感があります。
本領発揮には300-350時間のエージングが必要とのこと。本当にここまで必要なのか疑問もありますが、やらないとわかりませんのでエージングを開始。2週間ガンバレ!
ちなみに、どの比較情報を見ても「OPA627」が群を抜いた高評価。形はMUSES01Dと同じDIP8ピンですが、1回路物なので今の基板では使えません。
実売価格は1個6,000円もします。DI-1に使うなら2個必要ですが、ここまでになると良質なダイレクトボックスを買った方が良さそうなので止めておきます。
端っからDI-1の限界に挑戦するつもりは無く、部品代5,000円未満で改善出来るならアリぢゃねってプランですからね。
予想以上に良い経過を得ているので更に上を試してみたい気持ちは捨てきれませんけどwww
余談かもしれませんが、amazonや中華電機には刻印を書き換えた偽物が多いらしいのでご注意を。5,000円以下のOPA627は怪しさ満点だし、MUSESシリーズは秋月電子通商以外で買わない方がいいとのこと。真相を確かめる気はありませんので、ナンとも言えないところですけどね。
オマケとして、今回の基板と外したM5218の記念撮影。
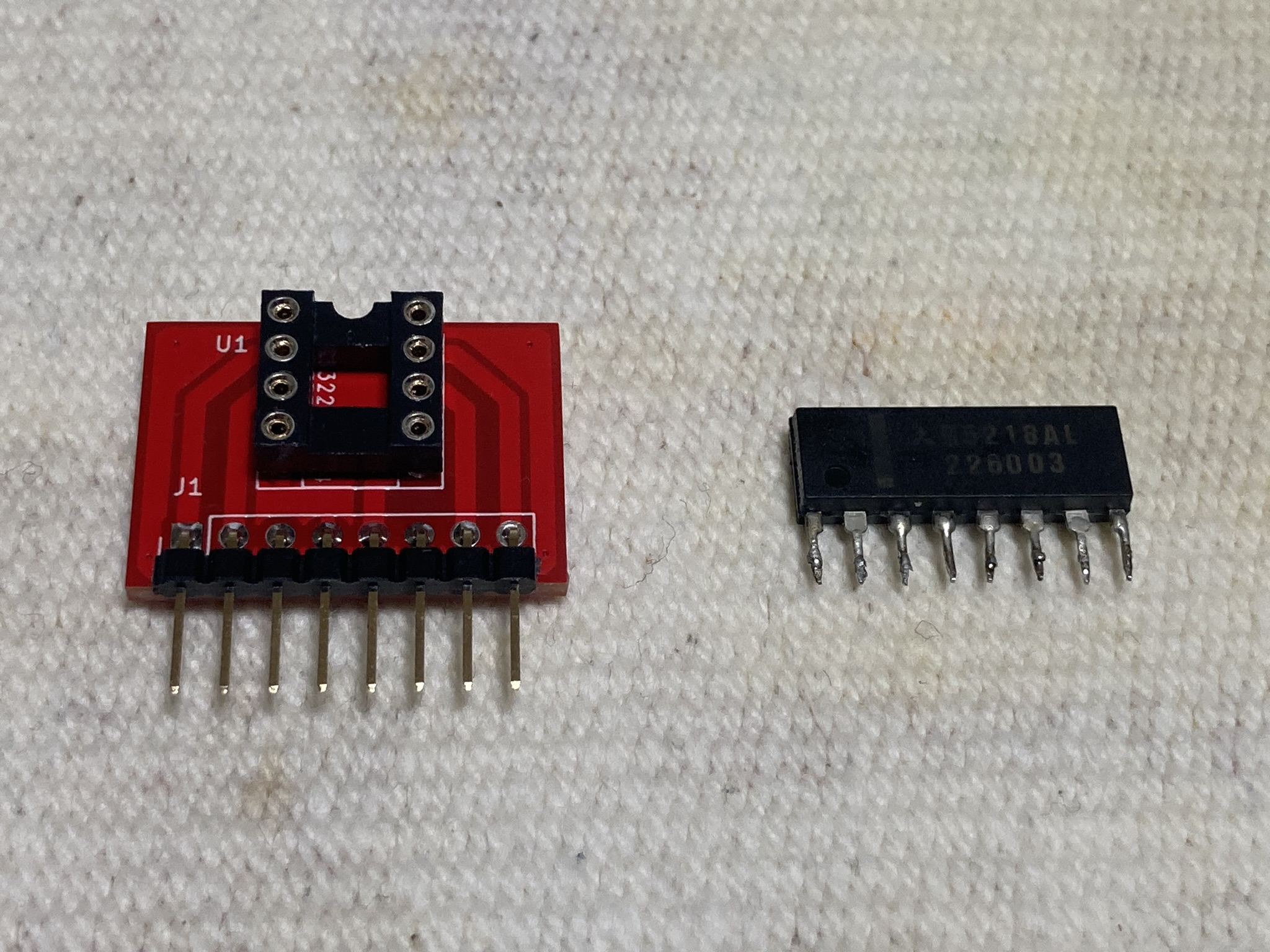
aitendoさんに同じ用途の基板がありました。
0.65-2.54/8P★SIL変換基板(3枚入)
DI-1の基板並みに太くて真っすぐな配線にグランドシールドが過剰にされている物が欲しかったので私には少し違うのですが、これを使えば同様の改造が可能だと思います。
aitendoさんのアイデア商品は売り切りで終わりになる事が多いので、興味のある方はお早めに購入されることをお勧めします。
3枚100円は安い!!
#音の世界 #器具の製作
エージングが済んでいないのにNJM4580Dよりも圧倒的に良い音です。良い音の基準は難しいですが、第一印象は重なって隠れてしまう音が一つも感じられないことです。今まで聞こえなかった音が聴こえるとか、音の向こうの無音まで聴こえてきそうだと書いたら大げさですがそんな感じ。ジャズっぽい音源で試していますが、主旋律は勿論、僅かに入っている伴奏の輪郭や余韻まで明瞭に聴こえ、NJM4580Dではあまり聴こえなかったスネアのブラシにまで存在感があります。粒立ちが良く透明感があるとでも書けばオーディオ評論っぽい?
いかにもJRCの音なのは否定しませんが、これ以上は自分のバカ耳では評価不能かも。凄いの一言です。ちょっと聴いただけで「良い音ぢゃね!?」と思ってもらえるレベルだと思います。
バンドモノの現場で楽器を繋いで試してみたいです。ベースはもちろん、キーボードの音も圧倒的に良くなりそうな期待感があります。
本領発揮には300-350時間のエージングが必要とのこと。本当にここまで必要なのか疑問もありますが、やらないとわかりませんのでエージングを開始。2週間ガンバレ!
ちなみに、どの比較情報を見ても「OPA627」が群を抜いた高評価。形はMUSES01Dと同じDIP8ピンですが、1回路物なので今の基板では使えません。
実売価格は1個6,000円もします。DI-1に使うなら2個必要ですが、ここまでになると良質なダイレクトボックスを買った方が良さそうなので止めておきます。
端っからDI-1の限界に挑戦するつもりは無く、部品代5,000円未満で改善出来るならアリぢゃねってプランですからね。
予想以上に良い経過を得ているので更に上を試してみたい気持ちは捨てきれませんけどwww
余談かもしれませんが、amazonや中華電機には刻印を書き換えた偽物が多いらしいのでご注意を。5,000円以下のOPA627は怪しさ満点だし、MUSESシリーズは秋月電子通商以外で買わない方がいいとのこと。真相を確かめる気はありませんので、ナンとも言えないところですけどね。
オマケとして、今回の基板と外したM5218の記念撮影。
aitendoさんに同じ用途の基板がありました。
0.65-2.54/8P★SIL変換基板(3枚入)
DI-1の基板並みに太くて真っすぐな配線にグランドシールドが過剰にされている物が欲しかったので私には少し違うのですが、これを使えば同様の改造が可能だと思います。
aitendoさんのアイデア商品は売り切りで終わりになる事が多いので、興味のある方はお早めに購入されることをお勧めします。
3枚100円は安い!!
#音の世界 #器具の製作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131