 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
2025年12月 この範囲を時系列順で読む この範囲をファイルに出力する
中華電機でこんなん見つけました。

正式名称がわからんのでバイスハンガーと呼称しています。
現地照明に行くとツアー機材に見かけることも多く、同様の製品をお使いの方々も多いようです。現物を購入したところ悪くありません。作りが綺麗で使い勝手は良くパイプへの食い付きも良い。これが1個あたり800円切る価格で手に入るのですから驚きです。発注して一週間くらいで届きました。航空便が減っているのにこのリードタイムは速い。
重要なのは強度です。100kgの荷重をかけるなら安全率を4倍とって400kgの荷重をかけても壊れない確認をしたいところですが、400kgの重りも無ければそれに耐える吊り点もありません。ホームページには耐荷重150kgとありますので信用しましょう。「実用最大荷重」なのか「絶対最大荷重」なのかわかりませんが、前者であることを祈ります。
使っているムービングライト類に使うのはもちろんですが、これを二つ繋げて桁吊りパイプを吊る金具にもしようと画策中です。真っ当なCクランプは見た目に反して高価なので悪くないと思います。
また、長さ固定の自在クランプの様な構成もします。スポット単体で桁吊りをするワケです。小型のウォッシュムービングは明りの出所がサスバトンに近く、他のスポットと並べるとタッパを取る際に悩むからです。
#照明器具
正式名称がわからんのでバイスハンガーと呼称しています。
現地照明に行くとツアー機材に見かけることも多く、同様の製品をお使いの方々も多いようです。現物を購入したところ悪くありません。作りが綺麗で使い勝手は良くパイプへの食い付きも良い。これが1個あたり800円切る価格で手に入るのですから驚きです。発注して一週間くらいで届きました。航空便が減っているのにこのリードタイムは速い。
重要なのは強度です。100kgの荷重をかけるなら安全率を4倍とって400kgの荷重をかけても壊れない確認をしたいところですが、400kgの重りも無ければそれに耐える吊り点もありません。ホームページには耐荷重150kgとありますので信用しましょう。「実用最大荷重」なのか「絶対最大荷重」なのかわかりませんが、前者であることを祈ります。
使っているムービングライト類に使うのはもちろんですが、これを二つ繋げて桁吊りパイプを吊る金具にもしようと画策中です。真っ当なCクランプは見た目に反して高価なので悪くないと思います。
また、長さ固定の自在クランプの様な構成もします。スポット単体で桁吊りをするワケです。小型のウォッシュムービングは明りの出所がサスバトンに近く、他のスポットと並べるとタッパを取る際に悩むからです。
#照明器具
最近、現場の合間に「POSIX(ポジックス)」の勉強をしています。UNIX互換OSの標準仕様を定義したもので、OSや言語の仕様の基です。それぞれについて学ぶことも大切ですが、そもそもを知ることに意味はあります。たぶん最初からPOSIXを学んでも迷宮を彷徨うだけですが、ある程度わかってから読むと「なるほどぉ〜」が沢山です。
#C言語
#C言語
中華電機からレンズが入荷しました。非球面特性、PMMA製、2.0t、φ150、f200です。有機光学さんに比べたら見劣りしますが、十分な性能だと思われます。
あと10日乗り切れば実験が出来ます。
#器具の製作
あと10日乗り切れば実験が出来ます。
#器具の製作
ホール管理の増員です。
あと一週間ほどすると閑散期に入りますのでネタの整理をしています。
常駐の者と話したのですが、会場設備のArt-Netを使ってもRDMを使う人はこれまで全く居なかったとのこと。不用とは言いませんが、私が作ろうとしているArt-Net機器にRDMを対応させる必要があるかは微妙です。対応するかしないかで処理量が格段に違いますし、自分にとって便利な機器を作ることが開発方針ですから背伸びはいけません。思い返せばRaspberryPi縛りのトライアルとして始めたことですから、RaspberryPiで役不足ならそもそもが違ってきます。
課題はArt-Netの切替機とディレイ機能を持ったバッチマシンです。中規模なフェスを対象とし、DMXを8ユニバースくらい扱えればと思っています。
追記
ChatGPTに聞いたりして考えてみましたが、RDMには対応せずで良いと思います。何よりもRDMに対応したフィクスチャーが手元にありませんから自分にとってはあっても無くても変わりません。
RDMは仕込みが一定のアミューズメント施設などでは効果があると思いますが、仮設においては微妙です。
てなわけで、ブロードキャストのArtDmxだけ扱う切替機、パッチマシンを作りましょう。
#[Art-Net]
あと一週間ほどすると閑散期に入りますのでネタの整理をしています。
常駐の者と話したのですが、会場設備のArt-Netを使ってもRDMを使う人はこれまで全く居なかったとのこと。不用とは言いませんが、私が作ろうとしているArt-Net機器にRDMを対応させる必要があるかは微妙です。対応するかしないかで処理量が格段に違いますし、自分にとって便利な機器を作ることが開発方針ですから背伸びはいけません。思い返せばRaspberryPi縛りのトライアルとして始めたことですから、RaspberryPiで役不足ならそもそもが違ってきます。
課題はArt-Netの切替機とディレイ機能を持ったバッチマシンです。中規模なフェスを対象とし、DMXを8ユニバースくらい扱えればと思っています。
追記
ChatGPTに聞いたりして考えてみましたが、RDMには対応せずで良いと思います。何よりもRDMに対応したフィクスチャーが手元にありませんから自分にとってはあっても無くても変わりません。
RDMは仕込みが一定のアミューズメント施設などでは効果があると思いますが、仮設においては微妙です。
てなわけで、ブロードキャストのArtDmxだけ扱う切替機、パッチマシンを作りましょう。
#[Art-Net]
2025年11月 この範囲を時系列順で読む この範囲をファイルに出力する
中華電機を眺めていたら樹脂レンズがありました。PMMA製2.0.t/φ150/f200です。もちろんお安い。有機光学さんのレンズはオーバースペックですからこんなんでもいいのかな?
#器具の製作
#器具の製作
本業対応で工作はお休みというか具体的に進められない状況ですが、PICマイコンのプログラムを書きたくてたまりません。脳ミソの容量が小さいので全力対応の別世界物件(舞台と工作)を2つ同時に扱うことはできません。
主に絞りを調整する機能の部分ですが、想定のスイッチ操作でステッピングモーターが動いてイメージ通りに絞りが変化したら楽しいでしょうねぇ~。
モータードライバーにモードとパルスを送るだけですから難しいことは一つもないのですが、動作のイメージをソースコードに置き換える作業は頭を全振りしないといけないため片手間には出来ません。
そんな悦な時間が持てないことは悲しい限りですが、自分の世界に没頭するために目の前の現場を仕上げましょう。
#器具の製作
主に絞りを調整する機能の部分ですが、想定のスイッチ操作でステッピングモーターが動いてイメージ通りに絞りが変化したら楽しいでしょうねぇ~。
モータードライバーにモードとパルスを送るだけですから難しいことは一つもないのですが、動作のイメージをソースコードに置き換える作業は頭を全振りしないといけないため片手間には出来ません。
そんな悦な時間が持てないことは悲しい限りですが、自分の世界に没頭するために目の前の現場を仕上げましょう。
#器具の製作
ロッドリフレクタは外径Φ8mm、内径6mmのアクリル丸パイプの外壁にミラー調スプレーを施工し、アクリルパイプの端にΦ13mmのLEDレンズを装着する構想でいます。
LEDレンズはΦ8mmのLEDに直接被せる代物ですが、ロッドリフレクタの端をLED光源に見立てれば同じことかなと。4in1のLEDは田の字に4色のLEDが並んだ構造なのでロッドリフレクタを入れないと激しい色むらになると思われます。
レンズ系の構成は簡単そうで難しいのでやってみないとわかりません。望む照度と効果が出ればいいのですけど。。。
本業が無茶苦茶忙しいので工作はしばらくお休みです。
#器具の製作
LEDレンズはΦ8mmのLEDに直接被せる代物ですが、ロッドリフレクタの端をLED光源に見立てれば同じことかなと。4in1のLEDは田の字に4色のLEDが並んだ構造なのでロッドリフレクタを入れないと激しい色むらになると思われます。
レンズ系の構成は簡単そうで難しいのでやってみないとわかりません。望む照度と効果が出ればいいのですけど。。。
本業が無茶苦茶忙しいので工作はしばらくお休みです。
#器具の製作
松村さんのレンズが入荷しました。とても良いレンズです。
ですが重量が気になります。手に持ってズッシリきます。PAR缶に実装した際の重量バランスに不安を感じる程です。有機光学さんの樹脂レンズにした方がいいかな?と思ったりしています。サオで突いたら樹脂レンズは砕けそうですが・・・。一発で正解にたどり着くことはありませんのでイロイロ試しましょう。
追記
有機光学さんは受注過多により年内は受注停止状態だそうです。
残念ですが、しばらくは松村さんのレンズで開発・検証を進めましょう。
購入した松村さんのレンズは焦点距離178mmですが、有機光学さんにも焦点距離170mmの物があります。若干の違いはありますが、現象の確認を進めるには許容範囲だと思います。
プリント基板はLED用、モーター制御用、リミットスイッチ用の3種をオーダーする予定ですが、費用の大半が送料なので出来ればまとめてオーダーしたい。モーター制御回路が終わっていないので、当面は仮の光源をこさえて実験を進めましょう。
#器具の製作
ですが重量が気になります。手に持ってズッシリきます。PAR缶に実装した際の重量バランスに不安を感じる程です。有機光学さんの樹脂レンズにした方がいいかな?と思ったりしています。サオで突いたら樹脂レンズは砕けそうですが・・・。一発で正解にたどり着くことはありませんのでイロイロ試しましょう。
追記
有機光学さんは受注過多により年内は受注停止状態だそうです。
残念ですが、しばらくは松村さんのレンズで開発・検証を進めましょう。
購入した松村さんのレンズは焦点距離178mmですが、有機光学さんにも焦点距離170mmの物があります。若干の違いはありますが、現象の確認を進めるには許容範囲だと思います。
プリント基板はLED用、モーター制御用、リミットスイッチ用の3種をオーダーする予定ですが、費用の大半が送料なので出来ればまとめてオーダーしたい。モーター制御回路が終わっていないので、当面は仮の光源をこさえて実験を進めましょう。
#器具の製作
LEDは出来るだけ密に並べてクラスタにしますが、色むら対策と集光の手段が課題です。
色むら対策にはロッドリフレクタが効果的。集光にはコンデンサレンズが効果的。両方を使えたらいいけれどどうするか。微妙に矛盾するんです。
ロッドリフレクタは透明アクリルパイプの外面ににミラー塗装を施します。角度によってはアクリル面でも反射しますが、光漏れを抑制するのに何かで塗装するならミラーにしとけばいかなと。
コンデンサレンズはアイデアはありますがちょいと実験が必要です。
#器具の製作
色むら対策にはロッドリフレクタが効果的。集光にはコンデンサレンズが効果的。両方を使えたらいいけれどどうするか。微妙に矛盾するんです。
ロッドリフレクタは透明アクリルパイプの外面ににミラー塗装を施します。角度によってはアクリル面でも反射しますが、光漏れを抑制するのに何かで塗装するならミラーにしとけばいかなと。
コンデンサレンズはアイデアはありますがちょいと実験が必要です。
#器具の製作
3D-CADで書いた組図です。
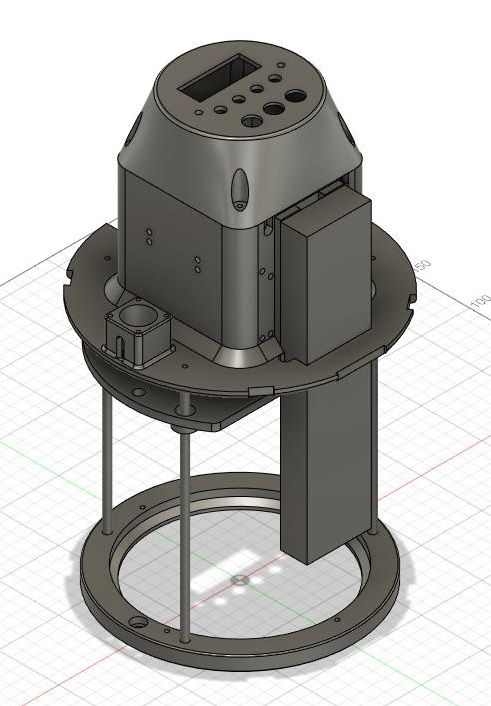
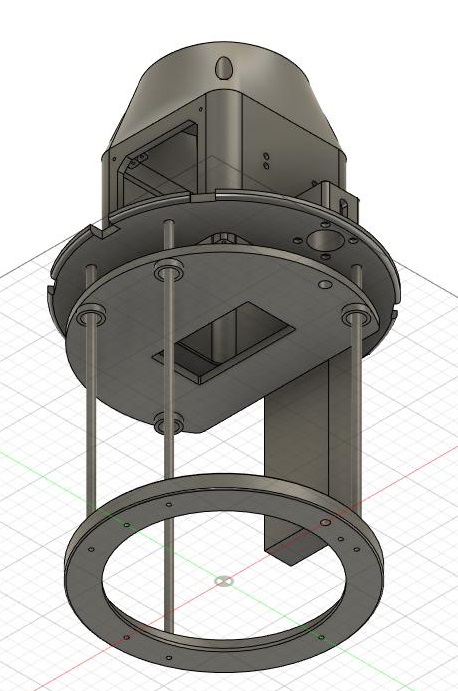
機構に目途がついたのでレンズを搭載しLED光源を作っていきます。
LED光源はロッドリフレクタにするか小型凸レンズをLED素子毎にするか悩み中です。
#器具の製作
機構に目途がついたのでレンズを搭載しLED光源を作っていきます。
LED光源はロッドリフレクタにするか小型凸レンズをLED素子毎にするか悩み中です。
#器具の製作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131