 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
2024年11月 この範囲を時系列順で読む この範囲をファイルに出力する
ncurses はウィンドウも定義出来ます。
今時のウィンドウとは違い、画面の中に子領域を作るイメージです。この領域内で文字位置が指定出来ます。子領域の左上を文字位置の 0,0 として扱えます。
ダイアログウィンドウを描くことも出来ますし、画面の区分けにも使えます。
今ネタになっている ArtNet-Patch では、すべてのレイアウトに共通する要素をメイン画面に描き、機能ごとの要素をウィンドウにして描こうかなと。表示位置のオフセット管理が楽になりますし、複数のレイアウトで共通する要素は使いまわしがしやすくなります。
ncurses はキー入力も受け取れますので、ユーザーの相手にする部分は ncurses で全て作れそうです。
後は string の使い方を頭に刷り込めば画面は作れるかなと。C言語の欠点は文字列の扱い難さですが、文字列は char の配列であることを頭に染み込ませてから string を勉強しなおしましょう。
アホかと思うくらいC言語について検索してきたので、これまで ncurses を知らなかったのは何故だろう。
#[Art-net] #C言語
今時のウィンドウとは違い、画面の中に子領域を作るイメージです。この領域内で文字位置が指定出来ます。子領域の左上を文字位置の 0,0 として扱えます。
ダイアログウィンドウを描くことも出来ますし、画面の区分けにも使えます。
今ネタになっている ArtNet-Patch では、すべてのレイアウトに共通する要素をメイン画面に描き、機能ごとの要素をウィンドウにして描こうかなと。表示位置のオフセット管理が楽になりますし、複数のレイアウトで共通する要素は使いまわしがしやすくなります。
ncurses はキー入力も受け取れますので、ユーザーの相手にする部分は ncurses で全て作れそうです。
後は string の使い方を頭に刷り込めば画面は作れるかなと。C言語の欠点は文字列の扱い難さですが、文字列は char の配列であることを頭に染み込ませてから string を勉強しなおしましょう。
アホかと思うくらいC言語について検索してきたので、これまで ncurses を知らなかったのは何故だろう。
#[Art-net] #C言語
C言語のライブラリである ncurses を勉強しています。ANSIエスケープシーケンスを簡単に使える様にしたライブラリです。
コマンドで全て描画するので今時の画面作りツールに比べたら面倒ですが、ANSIエスケープシーケンスを直接触ると思えば超簡単。歴史の長いライブラリのためか、奇妙な変化球がなくシンプルなのが私好み。
x-windowベースのグラフィカルな画面にしてもいいのですが、リソースの節約をしたいし、あえてレガシーな風味がいいかなと思っております。
Art-Netを受信して処理して送信する機能は一応出来ているので、まずは画面作りのお勉強をしましょう。データのモニターが出来ないと見えない部分の動作のチェックもし難いですしね。
#[Art-net] #C言語
コマンドで全て描画するので今時の画面作りツールに比べたら面倒ですが、ANSIエスケープシーケンスを直接触ると思えば超簡単。歴史の長いライブラリのためか、奇妙な変化球がなくシンプルなのが私好み。
x-windowベースのグラフィカルな画面にしてもいいのですが、リソースの節約をしたいし、あえてレガシーな風味がいいかなと思っております。
Art-Netを受信して処理して送信する機能は一応出来ているので、まずは画面作りのお勉強をしましょう。データのモニターが出来ないと見えない部分の動作のチェックもし難いですしね。
#[Art-net] #C言語
「TourZCAM/ETZ(初代)」を使っています。
かなり初期の LED-PAR です。明るさはボチボチですが全天候で消費電力が少ないので電源事情が厳しいライトアップで重宝しています。明るければイイとは限らないと思ったり。
購入して年数が経っていますので正常に動作しない機体も出ています。この製品は電源基板がNGになることがあり、部品交換で修理をするワケですが、メニュー画面もキー操作も正常なのに点灯しない機体を2台発見。開腹してチェックするも不良が見えない。基板がお亡くなりになったかと思いましたが、マニュアルを読み直したところ「RESET」メニューがある。工場出荷状態に戻す機能のようですが、ダメ元で試したところ2台とも復活してしまいました。
点灯しないモードに入ってしまった理由は不明ですが、サーマル・プロテクト(過熱保護)に入ると手動リセットしないといけないのかもしれません。
「不調ならまずリセットせい!」ってことにしました。
とりあえず全台復活です。
#器具の修理
かなり初期の LED-PAR です。明るさはボチボチですが全天候で消費電力が少ないので電源事情が厳しいライトアップで重宝しています。明るければイイとは限らないと思ったり。
購入して年数が経っていますので正常に動作しない機体も出ています。この製品は電源基板がNGになることがあり、部品交換で修理をするワケですが、メニュー画面もキー操作も正常なのに点灯しない機体を2台発見。開腹してチェックするも不良が見えない。基板がお亡くなりになったかと思いましたが、マニュアルを読み直したところ「RESET」メニューがある。工場出荷状態に戻す機能のようですが、ダメ元で試したところ2台とも復活してしまいました。
点灯しないモードに入ってしまった理由は不明ですが、サーマル・プロテクト(過熱保護)に入ると手動リセットしないといけないのかもしれません。
「不調ならまずリセットせい!」ってことにしました。
とりあえず全台復活です。
#器具の修理
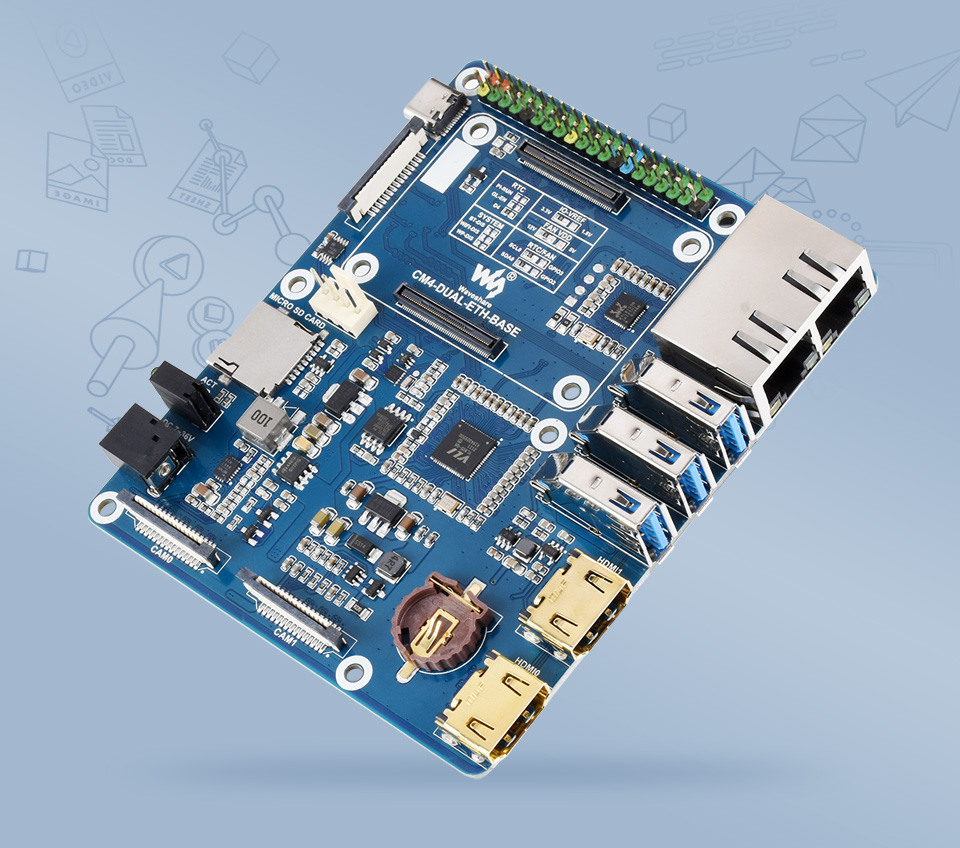
こんなん欲しいなぁ~と思っていた RaspberryPiCM4 用のマザーボードを発見!CM4-Dual-Eth-Base です。
中華電機のサイト
EtherNet が2系統、RTC、電源入力がUSB-Cでなく裏側にある、etc.
PCI-Ex1 もあれば満点ですが、USB-3.0 が3系統あるので十分です。
これが入荷したら ArtNet-Patch の開発を再開しようかと。晩酌の肴ですけどね。
画面作りに ncurses を使えばと思っていましたが、ふと思いついて調べ直したらこれは便利。ネットにも man にもわかり易く整理された情報がないので、お試ししながらオレオレマニュアルを作成して本体ページにアップしましょう。自分の為にですけどね。
最近、RaspberryPi の価格も下がってきました。CM4 が 中華電機で1万円せずに買えます。
#RaspberryPi #C言語 #[Art-Net]
中華電機のサイト
EtherNet が2系統、RTC、電源入力がUSB-Cでなく裏側にある、etc.
PCI-Ex1 もあれば満点ですが、USB-3.0 が3系統あるので十分です。
これが入荷したら ArtNet-Patch の開発を再開しようかと。晩酌の肴ですけどね。
画面作りに ncurses を使えばと思っていましたが、ふと思いついて調べ直したらこれは便利。ネットにも man にもわかり易く整理された情報がないので、お試ししながらオレオレマニュアルを作成して本体ページにアップしましょう。自分の為にですけどね。
最近、RaspberryPi の価格も下がってきました。CM4 が 中華電機で1万円せずに買えます。
#RaspberryPi #C言語 #[Art-Net]
客席テーブルの天板を延長するための接着剤を考えていました。
屋内使用がメインだと想定していますが、屋外で使うなと言っても使う奴はいるでしょう。接着剤は耐水性を選ぶべきかと。
となれば我らの味方「スーパーX」でしょうか。
木ボンドとは接着の仕組みが違いますが、素材と接着面の処理を間違わなければ強力に接着され、硬化した後は弾性特性を持った耐水性です。自分は異種接着や、耐水目地止めと接着を兼ねたい場合にコレです。
塗装に水性のウレタン・ニスを使えばスーパXを犯すことはありません。表板の厚みが3mmのために接着面にシンナーが届いてしまう可能性があって考えていましたが、ベストはわからないけど、スーパーXでダメってことは無かろうと割り切ったところです。
#ガチ工作
屋内使用がメインだと想定していますが、屋外で使うなと言っても使う奴はいるでしょう。接着剤は耐水性を選ぶべきかと。
となれば我らの味方「スーパーX」でしょうか。
木ボンドとは接着の仕組みが違いますが、素材と接着面の処理を間違わなければ強力に接着され、硬化した後は弾性特性を持った耐水性です。自分は異種接着や、耐水目地止めと接着を兼ねたい場合にコレです。
塗装に水性のウレタン・ニスを使えばスーパXを犯すことはありません。表板の厚みが3mmのために接着面にシンナーが届いてしまう可能性があって考えていましたが、ベストはわからないけど、スーパーXでダメってことは無かろうと割り切ったところです。
#ガチ工作
持ち歩きパソコンがおかしい。
ストレージのアクセスが100%に張り付いたまま。動作が遅くて使いモノにならない。
管理者権限のコマンドプロンプトで次を実行。
> chkdsk c: /f /r
1回目の実行である程度改善したもののまだおかしい。
改善したってことはセクターエラーが起こっているのでしょう。
念のため2回目を実行中。あと2時間くらいかな?
改善しないようなら早めにSSDを交換しましょう。
#パソコン
ストレージのアクセスが100%に張り付いたまま。動作が遅くて使いモノにならない。
管理者権限のコマンドプロンプトで次を実行。
> chkdsk c: /f /r
1回目の実行である程度改善したもののまだおかしい。
改善したってことはセクターエラーが起こっているのでしょう。
念のため2回目を実行中。あと2時間くらいかな?
改善しないようなら早めにSSDを交換しましょう。
#パソコン
客席テーブルは懸念事項がクリアできたので治具を作っていきます。
仕上がりで一番大事なのはテーブル面の平滑さです。繋がりに僅かな段差があっても使い心地が悪いからです。延長部はニス仕上げにしようと思っていますので0.1~0.2mmくらい低くして塗膜で調整するつもりです。ニスはワシンの油性1液ウレタンにするか水性ウレタンにするか思案中です。木ボンドに悪さをしないのはどちら?ってのがポイントです。
なんでかんで、ワシンのニスは素晴らしいのです。
#ガチ工作
仕上がりで一番大事なのはテーブル面の平滑さです。繋がりに僅かな段差があっても使い心地が悪いからです。延長部はニス仕上げにしようと思っていますので0.1~0.2mmくらい低くして塗膜で調整するつもりです。ニスはワシンの油性1液ウレタンにするか水性ウレタンにするか思案中です。木ボンドに悪さをしないのはどちら?ってのがポイントです。
なんでかんで、ワシンのニスは素晴らしいのです。
#ガチ工作
スマホ(iPhone)の電池を交換しました。ちょっと多めに電話をすると1日持たなくなったからです。
オジサンご用達の「SE2」ですが、ゲームをしないのでスペックに不満を感じることはありませんし、何よりも買い替えは高価過ぎます。
正規のショップにお願いしましたが、新品購入の1/10の費用ですし、専用の開封工具を使わないと画面が割れるリスクがあるので自分で頑張る程でもないかなと。
#器具の修理
オジサンご用達の「SE2」ですが、ゲームをしないのでスペックに不満を感じることはありませんし、何よりも買い替えは高価過ぎます。
正規のショップにお願いしましたが、新品購入の1/10の費用ですし、専用の開封工具を使わないと画面が割れるリスクがあるので自分で頑張る程でもないかなと。
#器具の修理
テーブルの天板を削ってみました。


切り子を吸うイイ感じの集塵ノズルを見つけたのでトリマーで加工しました。一回につき深さ0.3~0.5mmくらいの切削です。Φ32mmのビットを使ったのでバックラッシュが強いかと思いましたが、一回に削る深さを抑え目にすればほとんどありません。
削ったところには3mm厚の合板を貼るつもりですが、試し切りなので2.5mmくらいで止めてます。現物合わせで深さを調整します。
板の積層は表から3mm、9mm、溝に入れるサネが3mm、12mm、裏面の渡りが3mmです。溝はチップ合板にあるので精度が期待出来ませんので、表から2枚目の9mm厚を自動カンナ盤で調整しながらサネを合わせます。
見込みが付いたので進めましょう。
#ガチ工作
切り子を吸うイイ感じの集塵ノズルを見つけたのでトリマーで加工しました。一回につき深さ0.3~0.5mmくらいの切削です。Φ32mmのビットを使ったのでバックラッシュが強いかと思いましたが、一回に削る深さを抑え目にすればほとんどありません。
削ったところには3mm厚の合板を貼るつもりですが、試し切りなので2.5mmくらいで止めてます。現物合わせで深さを調整します。
板の積層は表から3mm、9mm、溝に入れるサネが3mm、12mm、裏面の渡りが3mmです。溝はチップ合板にあるので精度が期待出来ませんので、表から2枚目の9mm厚を自動カンナ盤で調整しながらサネを合わせます。
見込みが付いたので進めましょう。
#ガチ工作
2024年10月 この範囲を時系列順で読む この範囲をファイルに出力する
何気に忙しい今日この頃。
ちょっとした案件でオフが飛ぶ今日この頃。
んでも、客席テーブルの試案やLED-PARの修理はボチボチとやってます。
客席テーブルはアタマの中では工作手順が見えてきました。私の技術による誤差、相手物や材料の公差を考えておかないといけません。今は天板の延長が課題ですが、0.2mmの段差でも指先で触ればわかりますし、載せたモノを動かす際にも引っかかりになります。合板の厚みは±0.3mmくらいの公差がありますので2枚重ねたら誤差が0.6mmになる可能性があるので甘く考えたらいけません。塗装や接着剤の厚みも考慮する必要があります。完全な平面を目指すワケではありませんが、寸法の追い込み方を考えておかないと1mmくらい簡単にズレますので、手持ち工具と私の腕を考慮してどんな手順で進めたらいいか考えているワケです。
先ほど少し時間が空いたので天板の削りを試してみました。
天板は芯に木チップの圧縮板、それを両面からサンドイッチする合板、表面にはメラミン化粧板となっています。芯が木チップの圧縮板ですから木口からボルト、ダボ、雇いサネを入れるだけでは強度不足です。縁材を取り付けるための溝がありますのでコレを利用してサネは入れますが、表面と裏面に渡り材を入れるべきでしょう。裏面の渡り材は貼るだけでいいのですが、表面は面を合わせるのに渡り材の厚み分削らないといけません。
面を彫り込むのでルーターやトリマーを使うイメージですが、削るのは板の端ですからバックラッシュが強いこれらを使うには切削部の外側に天板と同じ高さの面を持つガイドが必須です。作ればいいのですが、精度を出すのも大変ですし、テーブル面は中心で1~2mmくらい上がるか下がるか湾曲していますのでガイドが正確ならいいってもんでもありません。この程度の湾曲ならテーブルとしては十分機能するのですが、貼る板の厚みが3~4mmなので50%もの誤差です。これは大きな数値です。
ならばと思って試したのが丸ノコでの切削です。私が使っている丸ノコは定盤が刃から95mmあるので、天板に定盤をシッカリ当てるイメージで進めればそこそこ正確に掘れます。もちろん定盤を当てる横方向のガイドは必須ですが、丸ノコの刃厚分ガイドを動かしながら地道に削っていけば思ったより正確な深さで削っていけます。天板の湾曲はありますが、丸ノコの定盤の長さは250mmくらいなので想定される誤差は0.05mmくらいに収まりますので材料厚の誤差からしたら気にしなくて良い値です。
文章だけでは伝わり難いとは思いますが、試しながら進めていきます。
#ガチ工作
ちょっとした案件でオフが飛ぶ今日この頃。
んでも、客席テーブルの試案やLED-PARの修理はボチボチとやってます。
客席テーブルはアタマの中では工作手順が見えてきました。私の技術による誤差、相手物や材料の公差を考えておかないといけません。今は天板の延長が課題ですが、0.2mmの段差でも指先で触ればわかりますし、載せたモノを動かす際にも引っかかりになります。合板の厚みは±0.3mmくらいの公差がありますので2枚重ねたら誤差が0.6mmになる可能性があるので甘く考えたらいけません。塗装や接着剤の厚みも考慮する必要があります。完全な平面を目指すワケではありませんが、寸法の追い込み方を考えておかないと1mmくらい簡単にズレますので、手持ち工具と私の腕を考慮してどんな手順で進めたらいいか考えているワケです。
先ほど少し時間が空いたので天板の削りを試してみました。
天板は芯に木チップの圧縮板、それを両面からサンドイッチする合板、表面にはメラミン化粧板となっています。芯が木チップの圧縮板ですから木口からボルト、ダボ、雇いサネを入れるだけでは強度不足です。縁材を取り付けるための溝がありますのでコレを利用してサネは入れますが、表面と裏面に渡り材を入れるべきでしょう。裏面の渡り材は貼るだけでいいのですが、表面は面を合わせるのに渡り材の厚み分削らないといけません。
面を彫り込むのでルーターやトリマーを使うイメージですが、削るのは板の端ですからバックラッシュが強いこれらを使うには切削部の外側に天板と同じ高さの面を持つガイドが必須です。作ればいいのですが、精度を出すのも大変ですし、テーブル面は中心で1~2mmくらい上がるか下がるか湾曲していますのでガイドが正確ならいいってもんでもありません。この程度の湾曲ならテーブルとしては十分機能するのですが、貼る板の厚みが3~4mmなので50%もの誤差です。これは大きな数値です。
ならばと思って試したのが丸ノコでの切削です。私が使っている丸ノコは定盤が刃から95mmあるので、天板に定盤をシッカリ当てるイメージで進めればそこそこ正確に掘れます。もちろん定盤を当てる横方向のガイドは必須ですが、丸ノコの刃厚分ガイドを動かしながら地道に削っていけば思ったより正確な深さで削っていけます。天板の湾曲はありますが、丸ノコの定盤の長さは250mmくらいなので想定される誤差は0.05mmくらいに収まりますので材料厚の誤差からしたら気にしなくて良い値です。
文章だけでは伝わり難いとは思いますが、試しながら進めていきます。
#ガチ工作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131