 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
2024年7月 この範囲を時系列順で読む この範囲をファイルに出力する
DA変換基板の仮デザインが終わりました。仮なのは必要な部品を配置したらどのくらいに収まるか目安を知るためです。
そのため実装に必要な取り付け穴などはありません。
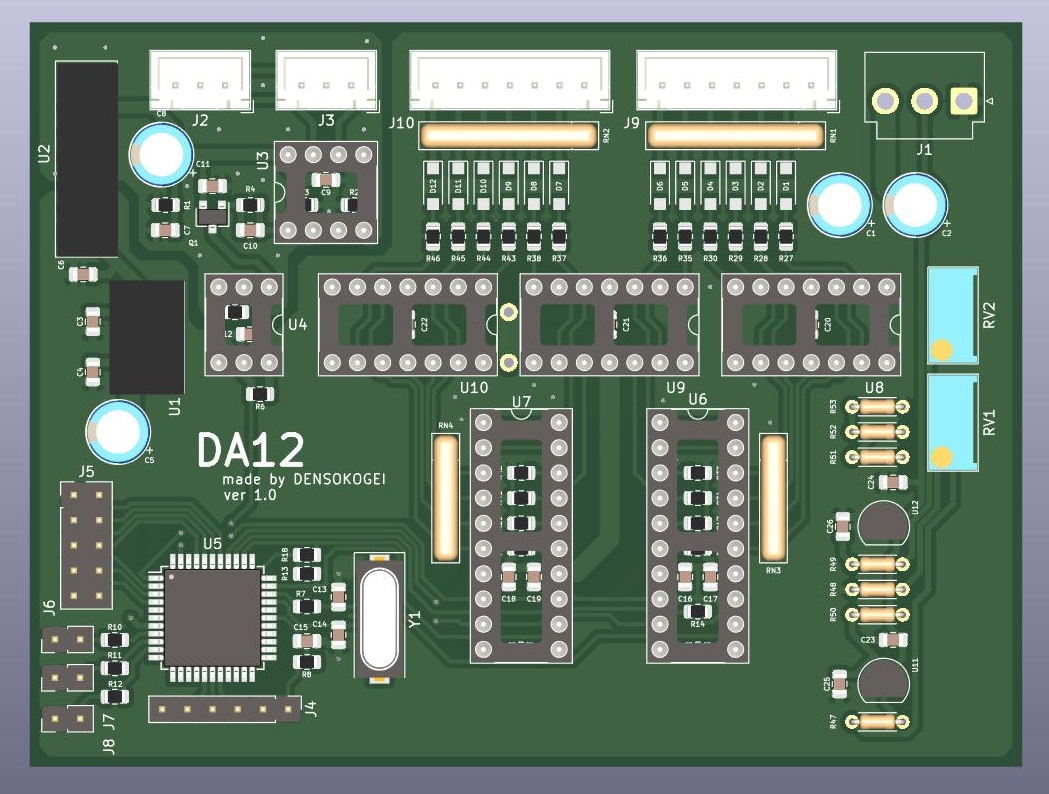
概ね希望のサイズ(図では100x75)に収まったので、実装の条件を整理し、基板サイズと取り付け穴を決めるのが次の作業です。
合間にやっているので時間がかかっていますが、急いでも調光ユニットの稼働が増える時期には間に合いませんのでノンビリやります。
KiCADとFusion360の連携はいいですね。
部品の3DモデルはFusion360で書いてSTEP形式でエクスポートすればKiCADで読み込めます。
基板上の干渉を確認出来ればいいのでそれほど書き込まなくても使えます。
今回はDC-DCコンバータのU1とU2だけです。画像は上面からなので黒いだけですが、3Dで視点を変えると周囲の部品との関係がよくわかります。
#器具の製作
そのため実装に必要な取り付け穴などはありません。
概ね希望のサイズ(図では100x75)に収まったので、実装の条件を整理し、基板サイズと取り付け穴を決めるのが次の作業です。
合間にやっているので時間がかかっていますが、急いでも調光ユニットの稼働が増える時期には間に合いませんのでノンビリやります。
KiCADとFusion360の連携はいいですね。
部品の3DモデルはFusion360で書いてSTEP形式でエクスポートすればKiCADで読み込めます。
基板上の干渉を確認出来ればいいのでそれほど書き込まなくても使えます。
今回はDC-DCコンバータのU1とU2だけです。画像は上面からなので黒いだけですが、3Dで視点を変えると周囲の部品との関係がよくわかります。
#器具の製作
ネットを見ていますと蓄電池(二次電池)の発明が沢山見受けられます。海外でも発明はされているのでしょうけど、国内での発明には目を見張るものがあります。
表面的でドラマチックな事柄しか扱わない大手メディアにこういった報道を期待しませんが、彼らも商売ですから売れる情報に偏るのは仕方ありません。情報の重さは人それぞれですので、厨二病を発症させて大手メディアに苦言を述べるのは止めておきましょう。
EVにおいて遅れを取っていると言われがちな日本のメーカーがEVの要と言ってもいい二次電池とモーターの技術に秀でているのは皮肉でしょうか。車体製造に秀でているのは言うまでもないのですし、パワープラントを差し替えるだけなら造作の負荷は大したことありません。良い物を作ればマーケティングでも成功するとは必ずしも言えませんが、ようやく理解され始めたEVの欠点を補える技術を持っているのが日本のメーカーなことは更なる皮肉です。
世界の支配者を自負する白人様は世代交代でアホになったのだなと痛感します。将来を見据えることに秀でていたから世界の支配者であれたハズなのに劣ったものです。東インド会社も終焉かな?
#雑記
表面的でドラマチックな事柄しか扱わない大手メディアにこういった報道を期待しませんが、彼らも商売ですから売れる情報に偏るのは仕方ありません。情報の重さは人それぞれですので、厨二病を発症させて大手メディアに苦言を述べるのは止めておきましょう。
EVにおいて遅れを取っていると言われがちな日本のメーカーがEVの要と言ってもいい二次電池とモーターの技術に秀でているのは皮肉でしょうか。車体製造に秀でているのは言うまでもないのですし、パワープラントを差し替えるだけなら造作の負荷は大したことありません。良い物を作ればマーケティングでも成功するとは必ずしも言えませんが、ようやく理解され始めたEVの欠点を補える技術を持っているのが日本のメーカーなことは更なる皮肉です。
世界の支配者を自負する白人様は世代交代でアホになったのだなと痛感します。将来を見据えることに秀でていたから世界の支配者であれたハズなのに劣ったものです。東インド会社も終焉かな?
#雑記
JAXAのH3ロケット3号機の打ち上げが成功しました!!
1号機の失敗がヤリ玉に挙がっただけに、2号機に続いての成功は嬉しいことです。
1号機については、H3の要である新型LE9エンジンを用いた1段目が正常に動作し、H2から流用した2段目が誤動作しました。ある意味H3のH3たる部分は成功したワケです。この点に着目せずH3全体をダメだ日本の技術はダメだと論じたメディアには疑問を感じています。プロジェクトが失敗したことは紛れもない事実ですが、H3は実現不可能とさえ言われたLE9エンジンが本丸ですから「LE9が成功したのに打ち上げが失敗だったことは残念だ」と言えないのが不思議。表面的で振り切った論評しか出来ない大手メディアの方がよっぽど性能不足だと思う。
ともかく成功しました。海外の打ち上げ手段に並ぶ低コストを実現したのですから、H2に匹敵する高成功率を積み上げ、スケジュールさえ合えばH3を選んでもらえるようになって欲しいものです。
ただ、イプシロンの時もそうですが、初期機体において詰めの甘さによる失敗が付きまとうのはどうにかして欲しい。複雑で高度な機械ですから一発で成功させるのは至難だと思いますが印象は大事です。JAXAはカグヤ、アカツキ、イカロス、コウノトリなどでNASAすら驚くことをやってのけてきたのですから、脇の甘さによる二流感を払拭できるようにご尽力を頂けたらと思っています。
これは余談かもしれませんが、JAXAの技術と成果は日本の防衛に寄与していると考えています。いざとなれば強力な兵器に転用できる技術だからです。もちろん、清すぎるくらい平和的な使い方しかしていませんが、確実な技術を持つことは実体を持つのと同義です。兵器の実体は無いが有るのと同じに扱われるなら最も平和的で低コストな抑止力です。
#雑記
1号機の失敗がヤリ玉に挙がっただけに、2号機に続いての成功は嬉しいことです。
1号機については、H3の要である新型LE9エンジンを用いた1段目が正常に動作し、H2から流用した2段目が誤動作しました。ある意味H3のH3たる部分は成功したワケです。この点に着目せずH3全体をダメだ日本の技術はダメだと論じたメディアには疑問を感じています。プロジェクトが失敗したことは紛れもない事実ですが、H3は実現不可能とさえ言われたLE9エンジンが本丸ですから「LE9が成功したのに打ち上げが失敗だったことは残念だ」と言えないのが不思議。表面的で振り切った論評しか出来ない大手メディアの方がよっぽど性能不足だと思う。
ともかく成功しました。海外の打ち上げ手段に並ぶ低コストを実現したのですから、H2に匹敵する高成功率を積み上げ、スケジュールさえ合えばH3を選んでもらえるようになって欲しいものです。
ただ、イプシロンの時もそうですが、初期機体において詰めの甘さによる失敗が付きまとうのはどうにかして欲しい。複雑で高度な機械ですから一発で成功させるのは至難だと思いますが印象は大事です。JAXAはカグヤ、アカツキ、イカロス、コウノトリなどでNASAすら驚くことをやってのけてきたのですから、脇の甘さによる二流感を払拭できるようにご尽力を頂けたらと思っています。
これは余談かもしれませんが、JAXAの技術と成果は日本の防衛に寄与していると考えています。いざとなれば強力な兵器に転用できる技術だからです。もちろん、清すぎるくらい平和的な使い方しかしていませんが、確実な技術を持つことは実体を持つのと同義です。兵器の実体は無いが有るのと同じに扱われるなら最も平和的で低コストな抑止力です。
#雑記
昨日まで本業が過密でした。明けての今日はバリバリの筋肉痛。歳も歳なのですから無茶はいかんです。
そんなワケで工作関連は一週間ほどお休みでした。
この後も少々面倒なプラン物が控えていますが、再開というか少しずつ進めないといけません。
#雑記
そんなワケで工作関連は一週間ほどお休みでした。
この後も少々面倒なプラン物が控えていますが、再開というか少しずつ進めないといけません。
#雑記
2024年6月 この範囲を時系列順で読む この範囲をファイルに出力する
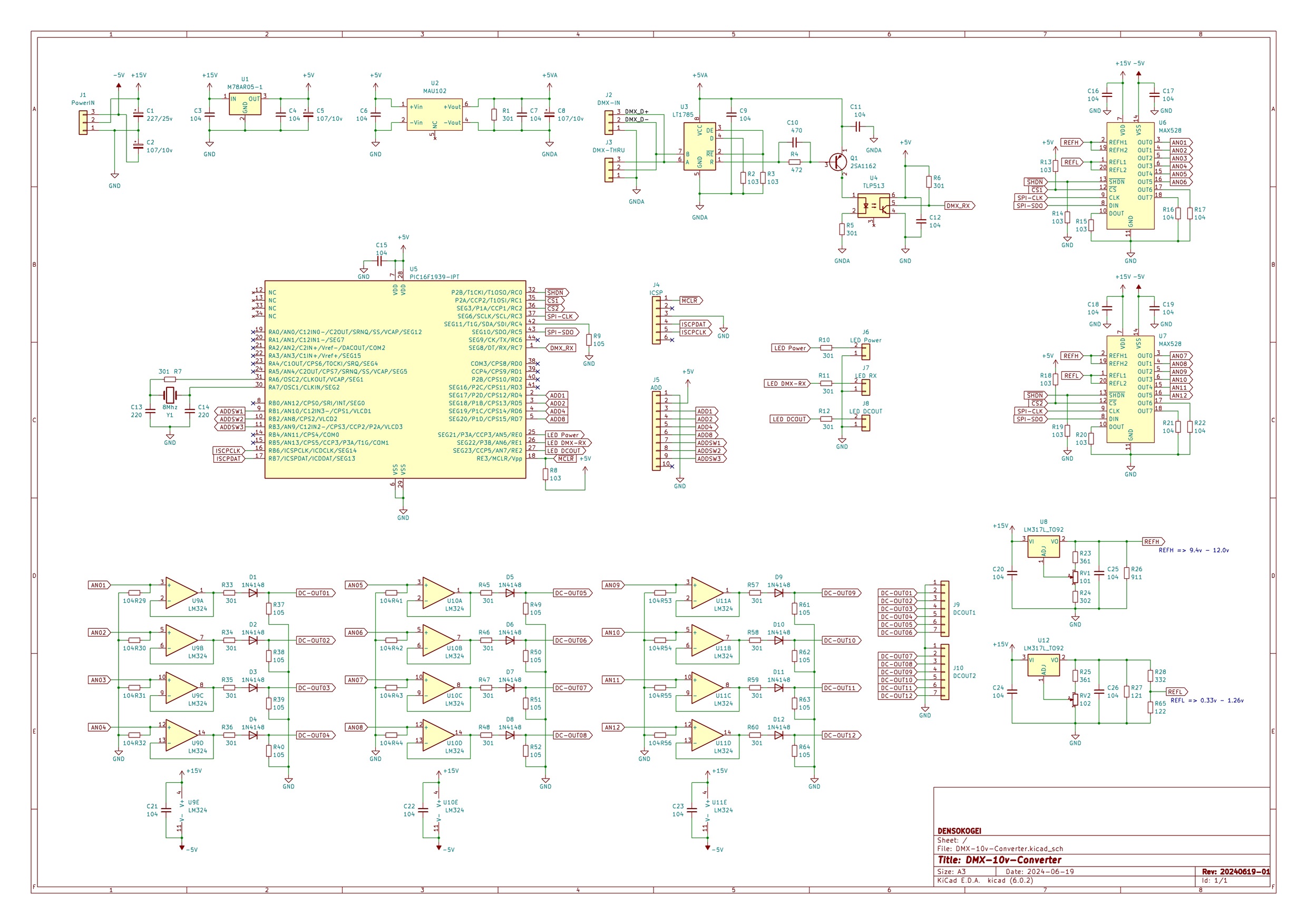
考えた事を吐き出したかったので、DMXアナログ変換の回路図を描き始めました。
PICでDMXを受けてMAX528を制御するだけですから回路は難しくありません。出力バッファにオペアンプ(LM324)を入れますがボルテージフォロアなのでこれも簡単です。
悩みどころはMAX528に与える基準電圧です。温度による変動を出来るだけ抑えなければなりません。抵抗による単純な分圧は温度変化に弱く電源電圧の変動に影響を受けます。ツェナーダイオードを用いるならバッファアンプが欲しい。ここは少し勉強し直しです。
追記
未完成ですが回路図を揚げてみます。
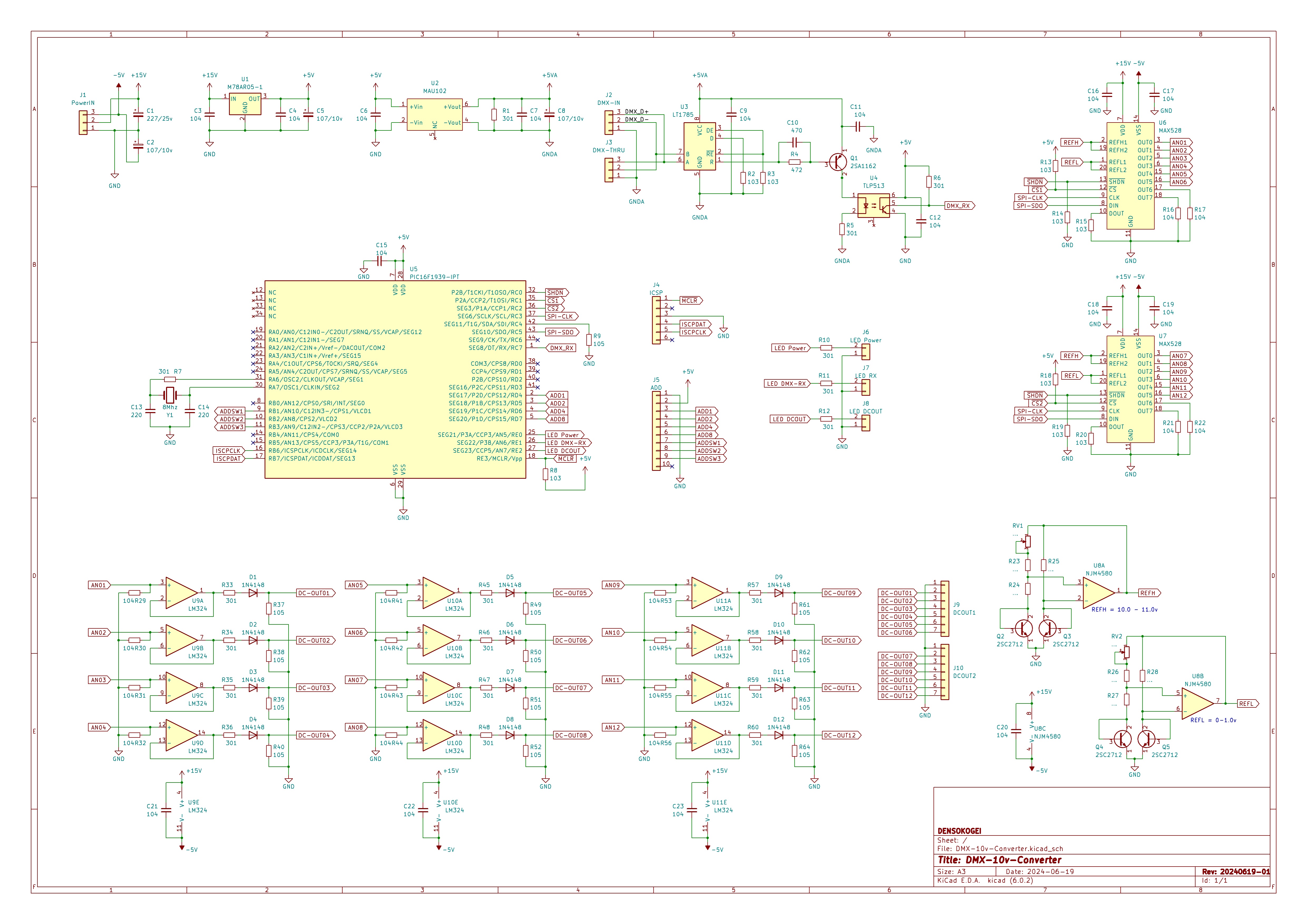
基準電圧回路(REFHとREFLを出している回路)は王道とも言える方法で温度変化に強いみたいですが、抵抗値の計算方法がまだ理解出来ていません。誤差の小さい金属皮膜抵抗を使うのがマストらしいです。
実はオペアンプの極性が逆ですが、未完成回路なので次に直っていればいいかなと。
#器具の製作 #電子工作
PICでDMXを受けてMAX528を制御するだけですから回路は難しくありません。出力バッファにオペアンプ(LM324)を入れますがボルテージフォロアなのでこれも簡単です。
悩みどころはMAX528に与える基準電圧です。温度による変動を出来るだけ抑えなければなりません。抵抗による単純な分圧は温度変化に弱く電源電圧の変動に影響を受けます。ツェナーダイオードを用いるならバッファアンプが欲しい。ここは少し勉強し直しです。
追記
未完成ですが回路図を揚げてみます。
基準電圧回路(REFHとREFLを出している回路)は王道とも言える方法で温度変化に強いみたいですが、抵抗値の計算方法がまだ理解出来ていません。誤差の小さい金属皮膜抵抗を使うのがマストらしいです。
実はオペアンプの極性が逆ですが、未完成回路なので次に直っていればいいかなと。
#器具の製作 #電子工作
ド平日に民謡コンクール。出場者がじーさんばーさんですから曜日は不問なんでしょね。
こんな時は製作物の基礎設計に限ります。
今日のネタはDMX-アナログコンバータ。MAX528のデータシートを読み込んでピンアサインと回路構成、初期化のアルゴリズムなど。イマイチ理解しきれなかったMAX528の使い方も解決。
回路図を描き始めようと思ったら作業パソコンを持ってきてなかった。諸々の条件をキッチリ整理します。
追記
有り余る時間でDMX-アナログコンバータの基礎設計が終わりました。
出力部にはバッファアンプとしてオペアンプLM324をかまします。MAX528はアンバッファモードの方が精度が良く、バッファアンプがあれば出力電流に余裕を持てるし、LM324は安価ですからMAX528の防壁としても位置付けられます。
今夜は晩酌のお供で回路図と基板デザインをしましょう。
#器具の製作 #照明器具
こんな時は製作物の基礎設計に限ります。
今日のネタはDMX-アナログコンバータ。MAX528のデータシートを読み込んでピンアサインと回路構成、初期化のアルゴリズムなど。イマイチ理解しきれなかったMAX528の使い方も解決。
回路図を描き始めようと思ったら作業パソコンを持ってきてなかった。諸々の条件をキッチリ整理します。
追記
有り余る時間でDMX-アナログコンバータの基礎設計が終わりました。
出力部にはバッファアンプとしてオペアンプLM324をかまします。MAX528はアンバッファモードの方が精度が良く、バッファアンプがあれば出力電流に余裕を持てるし、LM324は安価ですからMAX528の防壁としても位置付けられます。
今夜は晩酌のお供で回路図と基板デザインをしましょう。
#器具の製作 #照明器具
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131