 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
タグ「電子工作」を含む投稿[111件](10ページ目)
修理の話の続きです。
電源モジュールがダメな機体もあります。
起動しない機体、起動はするけど点灯させたり動かすと落ちる機体の2種類。
起動しない機体は電源モジュールが単純に壊れています。大概FETが飛んでいますので交換すれば復活しますが、何故飛ぶかは原因究明が難しい。
飛ぶFETがトランスより電源側の場合はサージ/スパーク対策の保護回路がダメな奴が多いようです。
これらはコンセント挿すときに「パチッ!」と言うアレす。パチッとなるのはかなり高い電圧が流れるからですが、これがFETに流れたら一発で壊れます。こういった高電圧ノイズには大きく分けて二つあってサージとスパークです。どちらも定格以上の電圧が発生する現象ですが、前者が電源電圧の数倍で比較的時間が長いもの、後者は静電気の部類で電圧がとても高いのですがほんの一瞬のものです。似たような現象ですが、対策する回路が違います。
サージ対策にはサージアブゾーバーを使うのが一般的です。ポリスイッチの一種で、高い電圧を受けると短絡してそれ以降の部品にかかる電圧を抑えます。サージ時間が長いと燃えますけどね・・・
スパーク対策にはスパークキラーを使います。耐電圧が高く反応が速いコンデンサと抵抗をパッケージにした物で、コンデンサでスパーク電流を吸収します。スイッチではないので反応が速いのが特徴です。ただし、サージの対策にはいささか不向きです。
飛ぶFETがトランスよりも出力側にある場合は原因究明が難しい。私は早々に諦めます。
起動はするけど点灯させたり動かすと落ちる機体も電源モジュールの不良ですが、出力側のバッファコンデンサに異常があるか、出力電流を検知する回路が定格異常を起こして本来よりも低い電流値でプロテクトに入ってしまうことが原因に多いようです。
修理は治った時の達成感はなかなかのものですが、その渦中は決して楽しくありません(笑
#電子工作
電源モジュールがダメな機体もあります。
起動しない機体、起動はするけど点灯させたり動かすと落ちる機体の2種類。
起動しない機体は電源モジュールが単純に壊れています。大概FETが飛んでいますので交換すれば復活しますが、何故飛ぶかは原因究明が難しい。
飛ぶFETがトランスより電源側の場合はサージ/スパーク対策の保護回路がダメな奴が多いようです。
これらはコンセント挿すときに「パチッ!」と言うアレす。パチッとなるのはかなり高い電圧が流れるからですが、これがFETに流れたら一発で壊れます。こういった高電圧ノイズには大きく分けて二つあってサージとスパークです。どちらも定格以上の電圧が発生する現象ですが、前者が電源電圧の数倍で比較的時間が長いもの、後者は静電気の部類で電圧がとても高いのですがほんの一瞬のものです。似たような現象ですが、対策する回路が違います。
サージ対策にはサージアブゾーバーを使うのが一般的です。ポリスイッチの一種で、高い電圧を受けると短絡してそれ以降の部品にかかる電圧を抑えます。サージ時間が長いと燃えますけどね・・・
スパーク対策にはスパークキラーを使います。耐電圧が高く反応が速いコンデンサと抵抗をパッケージにした物で、コンデンサでスパーク電流を吸収します。スイッチではないので反応が速いのが特徴です。ただし、サージの対策にはいささか不向きです。
飛ぶFETがトランスよりも出力側にある場合は原因究明が難しい。私は早々に諦めます。
起動はするけど点灯させたり動かすと落ちる機体も電源モジュールの不良ですが、出力側のバッファコンデンサに異常があるか、出力電流を検知する回路が定格異常を起こして本来よりも低い電流値でプロテクトに入ってしまうことが原因に多いようです。
修理は治った時の達成感はなかなかのものですが、その渦中は決して楽しくありません(笑
#電子工作
ムービングの修理をしています。
不調の現象は機体によって違いますが、今いじっている機種では特定の色が正常に点灯しない物が多い。点かなかったりフルにならなかったりです。
一番困るのが、しばらくすると点かなくなる機体です。マイコンからの信号が途絶えるのか、ドライバICがサーマルプロテクトに入るのか、その他か・・・
特定色が点かない機体はハンダ付けの不良が多かったようです。ハンダゴテを当てなおしたら大半が治るのですからクラックが入ってしまったのでしょう。
しばらく使うと特定色だけ点かなくなるが電源を落としてしばらく放置すると復活する機体は電流検出抵抗のハンダを盛ると治ることが多いようです。ハンダが足りないために熱を帯びて抵抗値が上がってしまい、ドライバICが電流値を誤検出するのが原因と思われます。
フルにならない機体も原因は同じ傾向のようで、ハンダゴテを当てなおしたりハンダを盛ると大半が回復します。ハンダを当て直しても治らない場合は、電流検出抵抗を交換すると高確率で治ります。
ではどれが電流検出抵抗かと聞かれても答えるのは難しいです。使われているLEDドライバICのデーターシートを参考に基板の配線から読み解くしかないからです。ただ、機種は違えどLEDのドライブ回路は似たり寄ったりなので、基本的な回路様式を2-3パターン知っていれば読み解くのはそれほど難しくありません。
もちろん、原因の全てがハンダ付けや電流検出抵抗にあるとは限りません。
部品の取り付けをよく見て、甘そうなハンダを当て直すのが第一歩という話でした。
#電子工作
不調の現象は機体によって違いますが、今いじっている機種では特定の色が正常に点灯しない物が多い。点かなかったりフルにならなかったりです。
一番困るのが、しばらくすると点かなくなる機体です。マイコンからの信号が途絶えるのか、ドライバICがサーマルプロテクトに入るのか、その他か・・・
特定色が点かない機体はハンダ付けの不良が多かったようです。ハンダゴテを当てなおしたら大半が治るのですからクラックが入ってしまったのでしょう。
しばらく使うと特定色だけ点かなくなるが電源を落としてしばらく放置すると復活する機体は電流検出抵抗のハンダを盛ると治ることが多いようです。ハンダが足りないために熱を帯びて抵抗値が上がってしまい、ドライバICが電流値を誤検出するのが原因と思われます。
フルにならない機体も原因は同じ傾向のようで、ハンダゴテを当てなおしたりハンダを盛ると大半が回復します。ハンダを当て直しても治らない場合は、電流検出抵抗を交換すると高確率で治ります。
ではどれが電流検出抵抗かと聞かれても答えるのは難しいです。使われているLEDドライバICのデーターシートを参考に基板の配線から読み解くしかないからです。ただ、機種は違えどLEDのドライブ回路は似たり寄ったりなので、基本的な回路様式を2-3パターン知っていれば読み解くのはそれほど難しくありません。
もちろん、原因の全てがハンダ付けや電流検出抵抗にあるとは限りません。
部品の取り付けをよく見て、甘そうなハンダを当て直すのが第一歩という話でした。
#電子工作
ライトアップのバラシで半日イントレに登っていたら気力の残量がゼロ。
今日は工作作業をオフです。
そういえば中国に頼んでいた基板が入荷。
とてもキレイです。こんな上物がこの数でこの価格?と素直に思えます。有難いを越えて商売になっているのか心配になるほどです。
リフローハンダで使おうと思って手配した工業用のホットプレートも入荷。
気力が残っていれば、次のオフでリフローハンダの実験をしたいなと。
リフローハンダが上手くいけば、随分前に試作だけしたTASCAM製プレイヤーのリモコンも作ろうかなと。
所属会社の音響君たち曰く、バックアッププレイヤーも同時制御出来ると心強いらしい。同じソースを入れておくのは言うまでもありませんが、RS232を2分配するだけで2台同時に動くので難しいことはありません。
今となってはMD/CDではなくCDプレイヤーが主になっていますが、TASCAM製のプレイヤーはRS232による制御方法がほぼ同じなので基本的な機能だけなら高い互換性を持たせられます。
#電子工作
今日は工作作業をオフです。
そういえば中国に頼んでいた基板が入荷。
とてもキレイです。こんな上物がこの数でこの価格?と素直に思えます。有難いを越えて商売になっているのか心配になるほどです。
リフローハンダで使おうと思って手配した工業用のホットプレートも入荷。
気力が残っていれば、次のオフでリフローハンダの実験をしたいなと。
リフローハンダが上手くいけば、随分前に試作だけしたTASCAM製プレイヤーのリモコンも作ろうかなと。
所属会社の音響君たち曰く、バックアッププレイヤーも同時制御出来ると心強いらしい。同じソースを入れておくのは言うまでもありませんが、RS232を2分配するだけで2台同時に動くので難しいことはありません。
今となってはMD/CDではなくCDプレイヤーが主になっていますが、TASCAM製のプレイヤーはRS232による制御方法がほぼ同じなので基本的な機能だけなら高い互換性を持たせられます。
#電子工作
基板の製造は「PCBgogo」さんにお願いしました。
他社と比較出来る程の知識も経験もありませんが、日本語対応が進んでいるのでやりとりが楽です。
まだ完全ではないと言っていますが、入稿したデータの完成予想画像をアカウント画面から見ることが出来ます。こちらの思惑通りにガーバーデータを受け取ってくれているか確認出来るのは凄い安心感です。
ちなみに他社さんですが、オーダー画面も設定パラメータもPCBgogoさんと大差ありません。言語が英語か日本語かの違いくらい。価格もほぼ同じ。
ここまでネットのシステムが似ていると製造システムも似ているのでは?と思います。仕上がりも大差ないのかもしれません。
ひょっとして、実際に作っているのは一社だったりして・・・
本業の忙しさが落ち着く頃に加熱台と共に入荷する見込みです。届いたら早速試験しましょう。
まずはリフローハンダからです。今回頼んだ基板5枚はリフローハンダの練習台でゴミになるかもしれませんが、大判のリフローの練習になれば御の字です。
リフローハンダに成功して動作チェックするところまで行ければ、確認と手直しをして本オーダーです。
さて、本業再開と・・・
#電子工作
KiCadはver6になっています。
以前インストールしたver5を使っていましたが、ver6はかなり使いやすい。
ただ、ネットの参考情報の大半がver5ベースなので、ver5で勉強してからver6にした方がいいかもしれません。ver6ベースの参考情報はまだ少ないようです。
ver5で書いたものをver6に持っていく場合はライブラリ周りで少し引っかかります。一見すんなり行けるのですが、ver5のライブラリはver6で編集出来ないよと言われてしまいます。実際は、ライブラリファイルを更新するのではなく、編集したオブジェクトのみを更新するとすれば問題なく完了します。
どちらかと言えば、ver5で作ったものをver6に持っていかないのがいいのかもしれません。
KiCadは私にとってCADLUS-Xの方言違い程度で使えたので案外楽でした。
基板屋さんもデータを正確に拾ってくれているので、今後基板を作る際にはKiCadです。
基板CADはレイヤーに当初から決められた製造上の役割りがあり、製作上の制約(パターン線間の隙間とか)を描く前に設定する必要があることだけ理解すればVecoterWorksやイラレと同じ感覚で使えます。
KiCadは、配線間違いを防止する観点からか、回路図を描いて部品同士の関係性を作ってからしか描けません。基板を描き始めるまでの儀式が多いかもしれません。
#電子工作
回路図の最新版です。
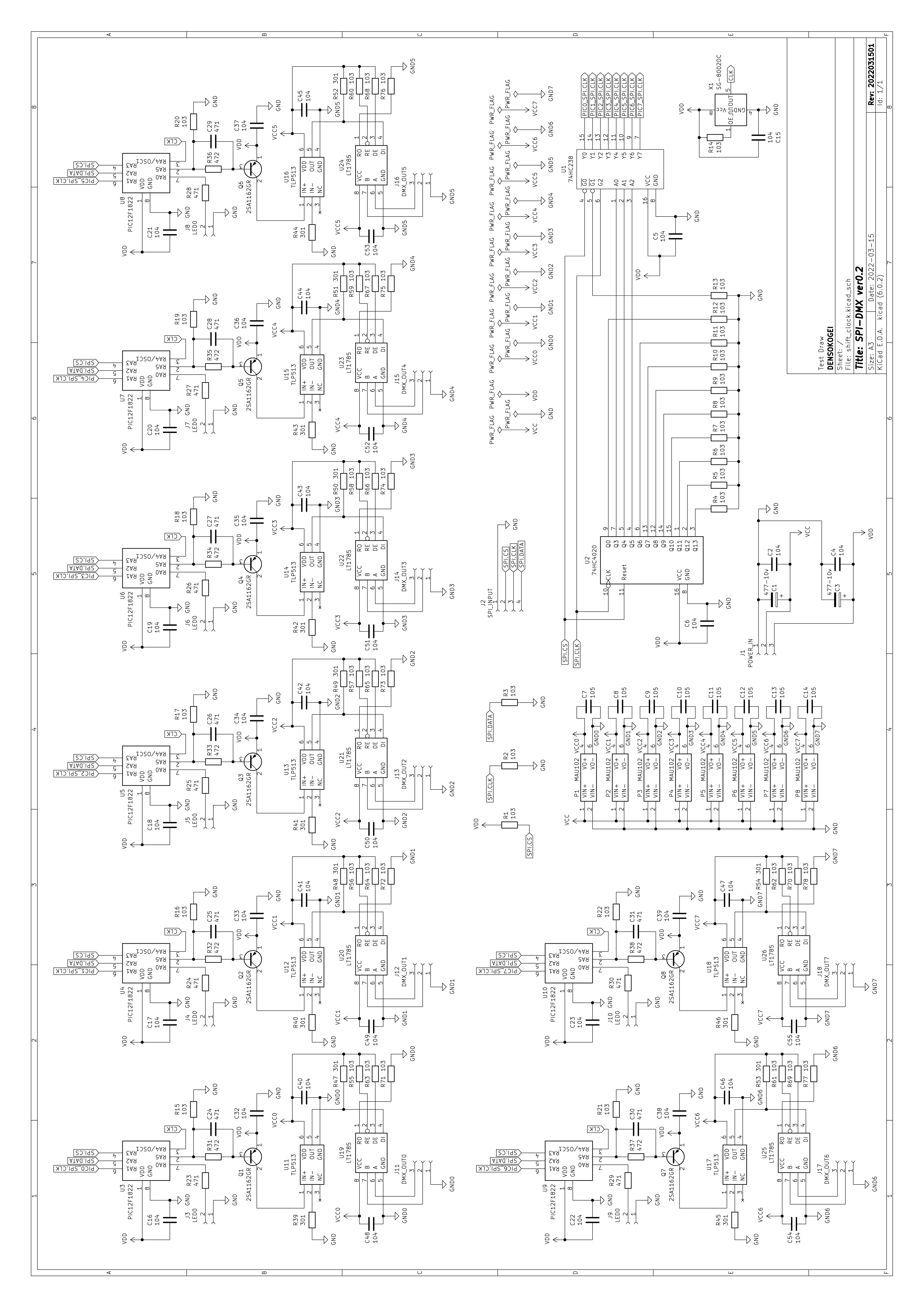
これで動いてくれたらいいのですけど・・・
#電子工作
Fusion360で部品の3Dモデルを描いて追加してみました。
モデルをSTEP形式で書き出せばそのままKiCadに持っていけます。
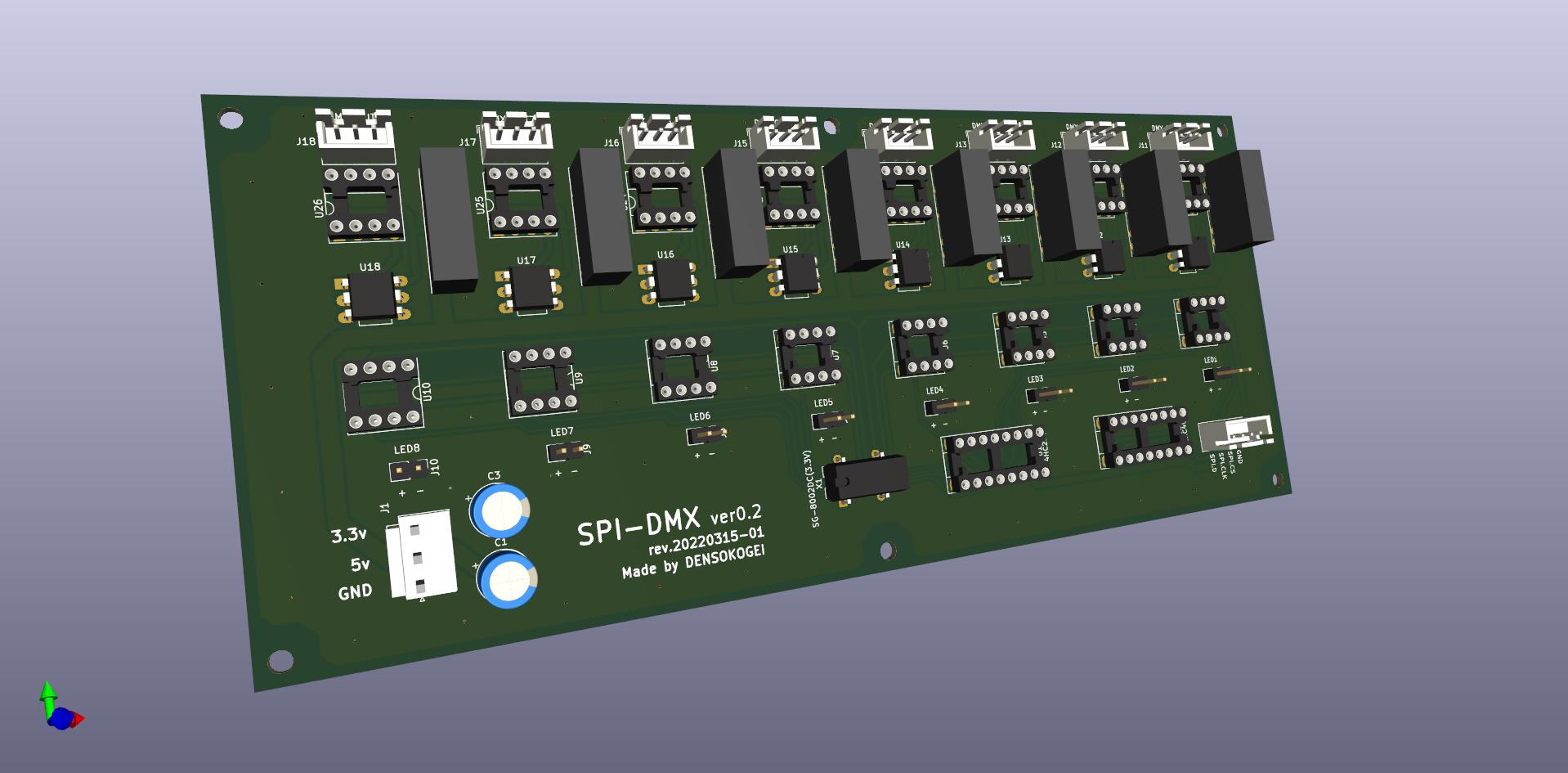
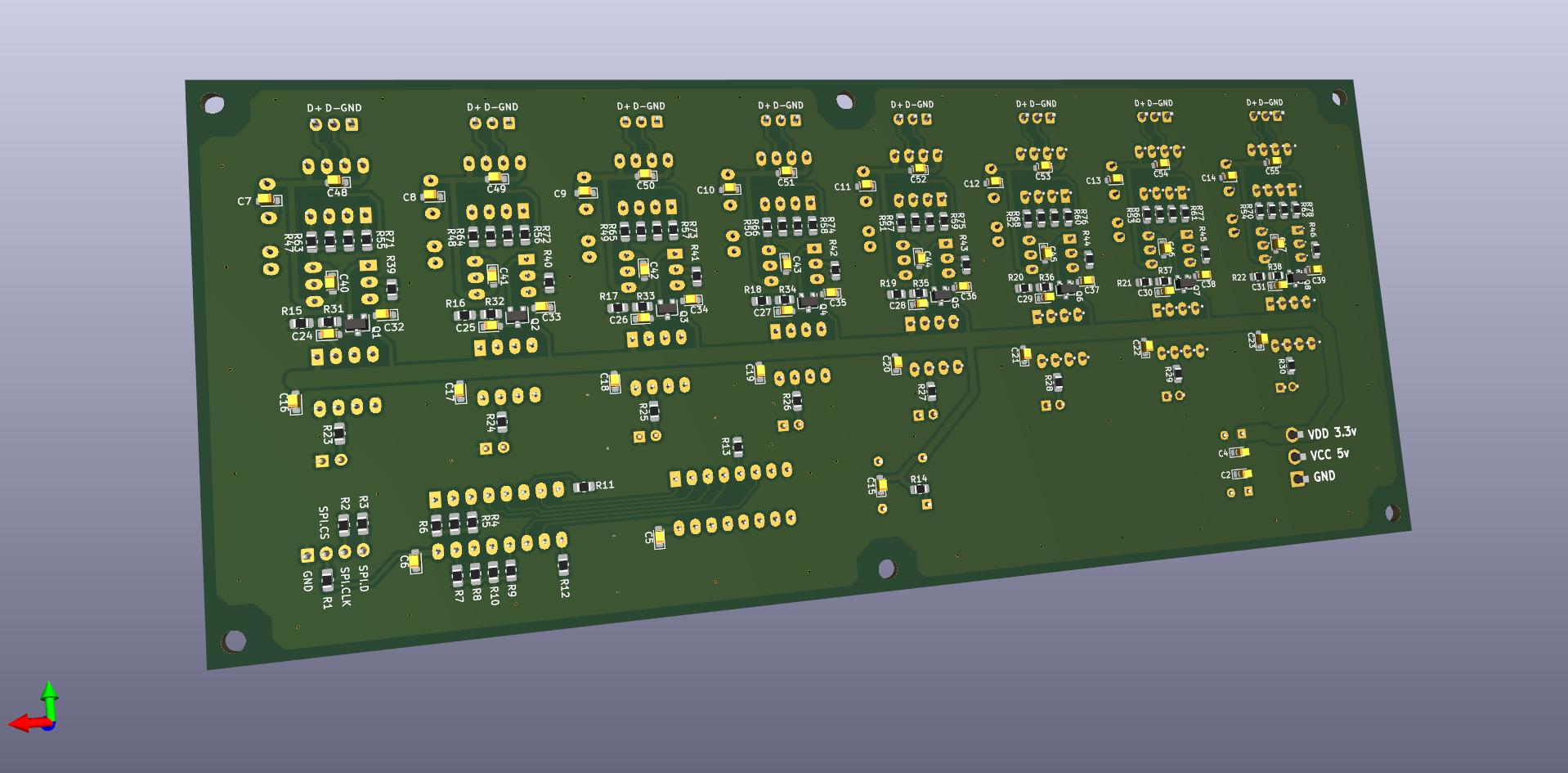
3Dの基板をグルグルさせてもすぐに飽きますが、部品の干渉やシルク(文字印刷)のチェックには効果絶大。
#電子工作
モデルをSTEP形式で書き出せばそのままKiCadに持っていけます。
3Dの基板をグルグルさせてもすぐに飽きますが、部品の干渉やシルク(文字印刷)のチェックには効果絶大。
#電子工作
そんなワケでKiCadを使ってみたワケです。
慣れるとサクサク描けて良いCADだと思います。空き時間にユックリ習作しましたが思った通り描けます。
ただ、基板の寸法はインチ法とメートル法が混在するので、CAD云々以前にこの辺で混乱するかも。
#電子工作
慣れるとサクサク描けて良いCADだと思います。空き時間にユックリ習作しましたが思った通り描けます。
ただ、基板の寸法はインチ法とメートル法が混在するので、CAD云々以前にこの辺で混乱するかも。
#電子工作
どうにもソワソワしてしまうので、基板を発注までやってみました。
画像はKiCadによる完成イメージです。
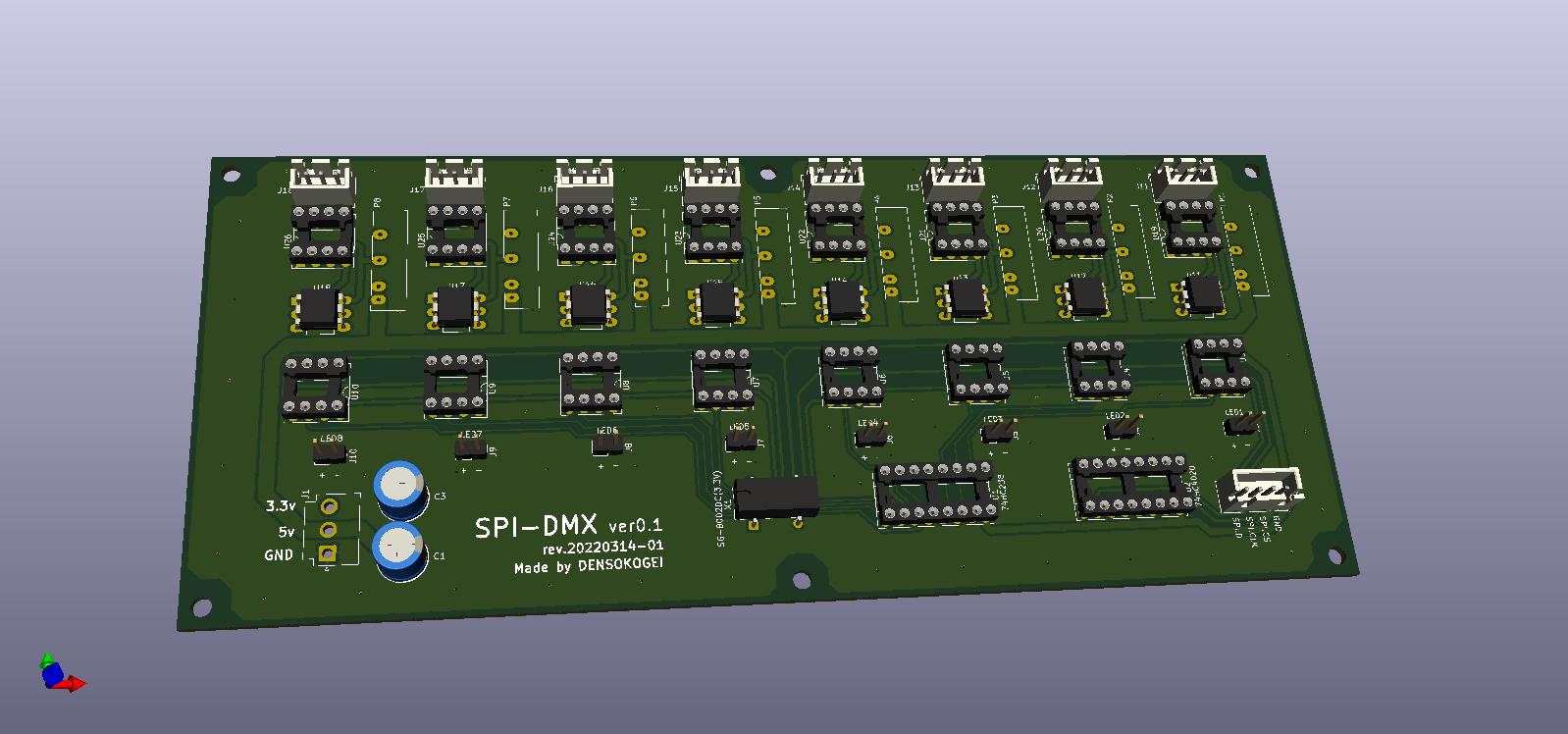
本来ならブレッドボードなどで回路を隅々まで確認してから発注するべきですが、工程を一通り流し、仕上がりを確認するためのテスト発注です。
200x85mmと少し大きめの基板ですが、5枚で12,000円程度。10枚にしても+2,000円くらい。長くお世話になったp板.comさんには申し訳ないけど、価格が1/10では・・・
コロナの影響で少し時間がかかるそうですが、10日前後なので速いです。
ちなみこの基板、SPI入力のDMXドライバです。RaspberryPiからCSありのSPIを送るだけでレガシーDMXを8ユニバース出します。もちろんアイソレーションしてます。想定通りに動けば、ですけどね。
追記
価格は100x100mm以下なら1枚200円前後、50x50mm以下なら100円前後。感光基板で自作するより遥かに安い。試作段階でも気軽に使えます。
#電子工作
画像はKiCadによる完成イメージです。
本来ならブレッドボードなどで回路を隅々まで確認してから発注するべきですが、工程を一通り流し、仕上がりを確認するためのテスト発注です。
200x85mmと少し大きめの基板ですが、5枚で12,000円程度。10枚にしても+2,000円くらい。長くお世話になったp板.comさんには申し訳ないけど、価格が1/10では・・・
コロナの影響で少し時間がかかるそうですが、10日前後なので速いです。
ちなみこの基板、SPI入力のDMXドライバです。RaspberryPiからCSありのSPIを送るだけでレガシーDMXを8ユニバース出します。もちろんアイソレーションしてます。想定通りに動けば、ですけどね。
追記
価格は100x100mm以下なら1枚200円前後、50x50mm以下なら100円前後。感光基板で自作するより遥かに安い。試作段階でも気軽に使えます。
#電子工作