 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
タグ「RaspberryPi」を含む投稿[60件](5ページ目)
オレメモ
RaspberryPiのSPIバッファサイズ
※出展:「RasPi 3B+ で最新の spidev_test を使う」
--------
現在の最大転送サイズを確認
$ cat /sys/module/spidev/parameters/bufsiz
4096 (byte)
これが固定値で変更不可といった書き込みが少なくありませんが変更可能です。
変更するには、/boot/cmdline.txt に下記変数を追加。
spidev.bufsiz=<サイズ数値>
拡大可能なサイズ
4096: OK (デフォルト)
16384: OK
65536: OK
1048576: OK (1MB)
4194304: OK (4MB) ⇒ 最大値 (これ以上を設定しても拡大しない)
--------
RaspberryPi4Bも同様だと思いますが、実機で確認してみましょう。
DMX512を8系統出そうと思っていますが、StartCodeやBreakTimeもSPIで送出するので4096バイトでは不足です。
試したところOKでした。
変更するファイルは/boot/cmdline.txtであって/boot/config.txtではありません。
開くと1行にいろいろなコマンドが書いてあります。このコマンド列の末尾に空白を入れてspidev.bufsiz=<サイズ数値>を記述します。
#RaspberryPi
RaspberryPiのSPIバッファサイズ
※出展:「RasPi 3B+ で最新の spidev_test を使う」
--------
現在の最大転送サイズを確認
$ cat /sys/module/spidev/parameters/bufsiz
4096 (byte)
これが固定値で変更不可といった書き込みが少なくありませんが変更可能です。
変更するには、/boot/cmdline.txt に下記変数を追加。
spidev.bufsiz=<サイズ数値>
拡大可能なサイズ
4096: OK (デフォルト)
16384: OK
65536: OK
1048576: OK (1MB)
4194304: OK (4MB) ⇒ 最大値 (これ以上を設定しても拡大しない)
--------
RaspberryPi4Bも同様だと思いますが、実機で確認してみましょう。
DMX512を8系統出そうと思っていますが、StartCodeやBreakTimeもSPIで送出するので4096バイトでは不足です。
試したところOKでした。
変更するファイルは/boot/cmdline.txtであって/boot/config.txtではありません。
開くと1行にいろいろなコマンドが書いてあります。このコマンド列の末尾に空白を入れてspidev.bufsiz=<サイズ数値>を記述します。
#RaspberryPi
RaspberryPiからレガシーDMXを出力する方法を妄想しています。
直接出すのは無理があります。UARTはありますが、2系統出すのが関の山。BreakTimeも出しにくい。
ならば、RaspberryPiからはSPIで出力し、PICで250kbpsのUARTに変換するのがいいかなと。
RaspberryPiからCS(チップセレクト)を使ってPICを選択するのがノーマルな方法ですが、レガシーDMXを出来る限り数多くだすには効率が悪い。SPIを休みなく送りつけたらPICは処理しきれませんので1ワード毎に休み時間を入れないといけない。また、PIC1個毎に一気にデータを送り付けるにはPICがデータをキャッシュ出来なければなりませんが、512バイト以上のメモリを持ったPICは選択肢が少なくピン数も多い。
しかるに、SPIを普通に使ったら2系統扱うのが限界だと思われます。
で、考えた方法が、複数のPIC(レガシーDMX1系統に付き1個使用)がRaspberryPiから1個に見える方法です。
RaspberryPiからは複数のユニバースのデータを適切に並べ替えて一気に送出します。RaspberryPiにとっては一番ストレスが無い方法です。
もちろんPICはこれを捌くことが出来ませんから、RaspberryPiとPICの間に仕掛けを入れます。
SPIはクロック同期型の送信方法ですからデータ線の他にクロック線があります。受信はクロックによって実行されますので、CSがアクティブでも、データ線に変化があっても、クロックが伴わなければ何も起こりません。通常ならCSを用いて受信先を決定しますが、クロックの出力先を仕分けても同じことです。
送信が始まって1から8カウントの間は1番目のPICへSPIのクロックを送り、9から16カウントの間は2番目のPICへSPIのクロックを送り・・・以下末番のPICまで繰り返します。RaspberryPiから送信があっても、クロックが行かない受信器にとってはワードとワードの間の休み時間でしかありません。
これなら、送信するRaspberryPiからはPIC達が1個に見え、受信するPIC達には自分宛のデータがだけが届きます。RaspberryPiが休みなく送信してもPIC側は他が受信している間に処理を進められますし、RaspberryPiの送信タイミングが適切であれば受信したSPIのデータをUARTに渡すだけでPIC内でのスタックは不要です。ピン数が少ないPIC12F1822でも対応可能ということ。
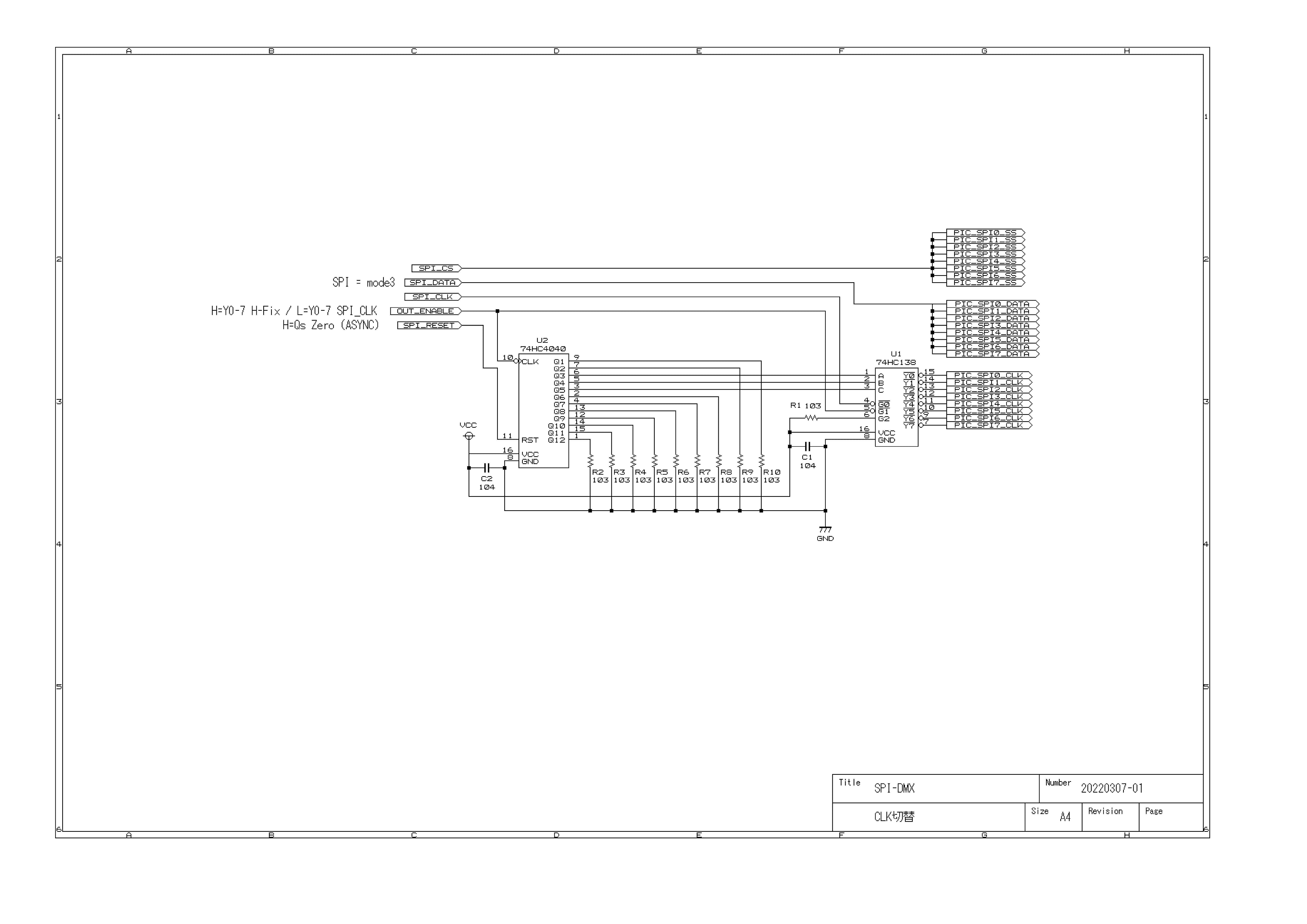
これを実現するクロックの仕分けは汎用ロジックICで行います。
バイナリカウンタ74HC4040
3to8 ラインデコーダ TC74HC138
この二つです。
数日前はGALを使おうかと思ったのですが、16ピンの汎用ロジック2個で可能ならこちらの方がいいかと。ファームウェア書かなくていいし、安いし、30年以上確実に動くし。
バイナリカウンタはクロックをカウントして2進数相当の出力をするICです。これにSPIクロックを入力し、下から4~6bit目の出力を使います。SPIクロックの8倍周期でカウントされる3bitのバイナリと見なせます。
8倍周期の3bitのバイナリをラインデコーダに入れます。ラインデコーダは入力された3bitのバイナリに相当するピンだけ出力します。このデコーダにSPIのクロックも入れれば8カウント毎に送り先が切り替わるクロックが出力されます。
SPIのモードは74HC4040の特性に合わせてmode3がよいと思われます。
文章で伝わりにくいのは承知していますが、アイデアがまとまってスッキリした。
オレメモってことで。
整理しきらないとモヤモヤして本業が手に付かなかったので回路図を描いてみました。気分スッキリ。
折角なので揚げてみました。
クリックして表示されるモノはぼやけてしまいますので、回路を追いたい方はサムネのリンク先の画像本体をダウンロードして見てください。
追記
回路図に間違い発見!
74HC4040のCLKにはSPI_CLKが入らないといけません。
74HC4040から74HC138のA,B,Cに行くのもQ4,Q5,Q6です。なら74HC4020でもいいな。
データは手直ししましたが、ここに再アップするのは面倒。まぁいいか。
さらに追記
クロックカウントの考え方が根本的に間違っているような気が・・・74HC4040(4020)のカウントの進み方がズレてね?最初のビットをサンプリングする前に1カウントされてしまうぞ。
ならばSPIをmode0で使えばいいか?mode0ならアイドル・ローだから74HC138ではなく74HC238か?
考え直し。
#電子工作 #RaspberryPi
直接出すのは無理があります。UARTはありますが、2系統出すのが関の山。BreakTimeも出しにくい。
ならば、RaspberryPiからはSPIで出力し、PICで250kbpsのUARTに変換するのがいいかなと。
RaspberryPiからCS(チップセレクト)を使ってPICを選択するのがノーマルな方法ですが、レガシーDMXを出来る限り数多くだすには効率が悪い。SPIを休みなく送りつけたらPICは処理しきれませんので1ワード毎に休み時間を入れないといけない。また、PIC1個毎に一気にデータを送り付けるにはPICがデータをキャッシュ出来なければなりませんが、512バイト以上のメモリを持ったPICは選択肢が少なくピン数も多い。
しかるに、SPIを普通に使ったら2系統扱うのが限界だと思われます。
で、考えた方法が、複数のPIC(レガシーDMX1系統に付き1個使用)がRaspberryPiから1個に見える方法です。
RaspberryPiからは複数のユニバースのデータを適切に並べ替えて一気に送出します。RaspberryPiにとっては一番ストレスが無い方法です。
もちろんPICはこれを捌くことが出来ませんから、RaspberryPiとPICの間に仕掛けを入れます。
SPIはクロック同期型の送信方法ですからデータ線の他にクロック線があります。受信はクロックによって実行されますので、CSがアクティブでも、データ線に変化があっても、クロックが伴わなければ何も起こりません。通常ならCSを用いて受信先を決定しますが、クロックの出力先を仕分けても同じことです。
送信が始まって1から8カウントの間は1番目のPICへSPIのクロックを送り、9から16カウントの間は2番目のPICへSPIのクロックを送り・・・以下末番のPICまで繰り返します。RaspberryPiから送信があっても、クロックが行かない受信器にとってはワードとワードの間の休み時間でしかありません。
これなら、送信するRaspberryPiからはPIC達が1個に見え、受信するPIC達には自分宛のデータがだけが届きます。RaspberryPiが休みなく送信してもPIC側は他が受信している間に処理を進められますし、RaspberryPiの送信タイミングが適切であれば受信したSPIのデータをUARTに渡すだけでPIC内でのスタックは不要です。ピン数が少ないPIC12F1822でも対応可能ということ。
これを実現するクロックの仕分けは汎用ロジックICで行います。
バイナリカウンタ74HC4040
3to8 ラインデコーダ TC74HC138
この二つです。
数日前はGALを使おうかと思ったのですが、16ピンの汎用ロジック2個で可能ならこちらの方がいいかと。ファームウェア書かなくていいし、安いし、30年以上確実に動くし。
バイナリカウンタはクロックをカウントして2進数相当の出力をするICです。これにSPIクロックを入力し、下から4~6bit目の出力を使います。SPIクロックの8倍周期でカウントされる3bitのバイナリと見なせます。
8倍周期の3bitのバイナリをラインデコーダに入れます。ラインデコーダは入力された3bitのバイナリに相当するピンだけ出力します。このデコーダにSPIのクロックも入れれば8カウント毎に送り先が切り替わるクロックが出力されます。
SPIのモードは74HC4040の特性に合わせてmode3がよいと思われます。
文章で伝わりにくいのは承知していますが、アイデアがまとまってスッキリした。
オレメモってことで。
整理しきらないとモヤモヤして本業が手に付かなかったので回路図を描いてみました。気分スッキリ。
折角なので揚げてみました。
クリックして表示されるモノはぼやけてしまいますので、回路を追いたい方はサムネのリンク先の画像本体をダウンロードして見てください。
追記
回路図に間違い発見!
74HC4040のCLKにはSPI_CLKが入らないといけません。
74HC4040から74HC138のA,B,Cに行くのもQ4,Q5,Q6です。なら74HC4020でもいいな。
データは手直ししましたが、ここに再アップするのは面倒。まぁいいか。
さらに追記
クロックカウントの考え方が根本的に間違っているような気が・・・74HC4040(4020)のカウントの進み方がズレてね?最初のビットをサンプリングする前に1カウントされてしまうぞ。
ならばSPIをmode0で使えばいいか?mode0ならアイドル・ローだから74HC138ではなく74HC238か?
考え直し。
#電子工作 #RaspberryPi
Art-Netは受信したデータのスタックの仕方を変えてうまくいきました。
約1/100秒毎でスタックし、1/40秒毎で出力しています。
試験的な処理ですが、Delayもユニバース単位で綺麗に動きます。
Art-Netの送受信の試験製作はこれにて終了。
ただ、テストで使っていた中華電器のArt-Netデコーダが不良品でした。
8アウトの製品ですが、普通に使うとDMXポートが1つしか信号を出さない。
組み合わせを吟味すると半分の4ポートは出力されますが、マニュアル通りに使って正しく動かないのでは現場じゃ使えません。
届いた時にMAdot2でテストしてちゃんと動いたような気がするのですが・・・
Art-Netのデコーダは市販品もありますが、RaspberryPiでここまで出来てしまうと自作した方が圧倒的に安い。市販品の国内価格は7-8万円ですが、材料費だけなら2万もしません。
レガシーDMXのインターフェースは基板から自作になりますが、PICマイコンでSPIからDMXにプロトコル変換するだけなのでそれほど難しくないハズ。パッチマシンとしてまとめる際には必要ですから作ってしまいましょう。
#RaspberryPi #[Art-Net]
約1/100秒毎でスタックし、1/40秒毎で出力しています。
試験的な処理ですが、Delayもユニバース単位で綺麗に動きます。
Art-Netの送受信の試験製作はこれにて終了。
ただ、テストで使っていた中華電器のArt-Netデコーダが不良品でした。
8アウトの製品ですが、普通に使うとDMXポートが1つしか信号を出さない。
組み合わせを吟味すると半分の4ポートは出力されますが、マニュアル通りに使って正しく動かないのでは現場じゃ使えません。
届いた時にMAdot2でテストしてちゃんと動いたような気がするのですが・・・
Art-Netのデコーダは市販品もありますが、RaspberryPiでここまで出来てしまうと自作した方が圧倒的に安い。市販品の国内価格は7-8万円ですが、材料費だけなら2万もしません。
レガシーDMXのインターフェースは基板から自作になりますが、PICマイコンでSPIからDMXにプロトコル変換するだけなのでそれほど難しくないハズ。パッチマシンとしてまとめる際には必要ですから作ってしまいましょう。
#RaspberryPi #[Art-Net]
RaspberryPiが手に入らない。手に入ってもボリボリ価格。
世界的な半導体不足を実感した瞬間でした。
3月下旬には入荷するそうです。
#RaspberryPi
世界的な半導体不足を実感した瞬間でした。
3月下旬には入荷するそうです。
#RaspberryPi
ガラクタ週間が終わり、終日本業のデスクワークでした。
会場図面書いて、照明プランの概要まとめ、見積りというデスクワークの王道メニューです。
嫌いじゃないのですが、ガラクタネタが中途なのでソワソワします。
今やっているArt-Netは卓とデコーダが必要な作業なので、荷物も多いし広いスペースも必要です。しばらくはお休みかな。
明日から現場が続きますが、RaspberryPiだけ持って行って現在のソースをオブジェクト指向っぽく書く練習をしようかなぁ。
そうそう、製作というレベルではありませんが、ピンスポット用の照準器を増産しました。その実態は小型カメラ用の自在雲台を介して短いピカティニーレールをピンに取り付けるクランプです。
細かい部品を買い増しして組み立てるだけなので15分くらいの作業でしたが、なぜ思い立って作ったかと言えば数日後の現場で数年ぶりにピンを振ることになったからです。
鈍った腕でも対応出来そうな演目ですが、お年頃からくる目のコンディションでバインド照準器が使えませんので、ダットサイトなどの目印が遠くに見える照準器に頼らないとダメだと思われます。
このクランプは5-6年前に作った代物です。以前作った物は部下にあげてしまったので、余っていた部品で改めて自分用をこさえたワケです。
#RaspberryPi #Python
会場図面書いて、照明プランの概要まとめ、見積りというデスクワークの王道メニューです。
嫌いじゃないのですが、ガラクタネタが中途なのでソワソワします。
今やっているArt-Netは卓とデコーダが必要な作業なので、荷物も多いし広いスペースも必要です。しばらくはお休みかな。
明日から現場が続きますが、RaspberryPiだけ持って行って現在のソースをオブジェクト指向っぽく書く練習をしようかなぁ。
そうそう、製作というレベルではありませんが、ピンスポット用の照準器を増産しました。その実態は小型カメラ用の自在雲台を介して短いピカティニーレールをピンに取り付けるクランプです。
細かい部品を買い増しして組み立てるだけなので15分くらいの作業でしたが、なぜ思い立って作ったかと言えば数日後の現場で数年ぶりにピンを振ることになったからです。
鈍った腕でも対応出来そうな演目ですが、お年頃からくる目のコンディションでバインド照準器が使えませんので、ダットサイトなどの目印が遠くに見える照準器に頼らないとダメだと思われます。
このクランプは5-6年前に作った代物です。以前作った物は部下にあげてしまったので、余っていた部品で改めて自分用をこさえたワケです。
#RaspberryPi #Python
PythonのThreadとQueueの使い方はだいたい理解しました。
0.005秒のsleepで動作周期を持たせたThreadで512個の整数を延々と加算してqueue.putに出力し、本処理では0.001秒のsleepで動作周期を持たせたqueue.get_nowaitで取り出しながら0.1秒毎に表示を更新しています。処理負荷が小さくメモリ使用量も安定していてスムーズです。本処理での時間軸の管理はアセンブラっぽいカウンタ処理ですが、厳密な処理周期は不要なのでsignalを使うほどでもありません。
Threadを使うメリットは高速化だと書く人が多いですが、私にとっては、処理によって違う要求時間を仕分け出来て、ポーリングだけど割り込みっぽいことが出来ることです。画面の更新はそれほど頻繁でなくていいけど、毎秒44回更新されるDMXの信号の処理は遅れたくないのですが、シングルスレッドでこの辺りを制御するのは案外面倒なのです。
気を付ける点はQueueのputやgetのタイミングです。Queueは変数ではなくFIFO特性のスタックなことが肝ですが、C言語のスタックやポインタにセマフォが混ざった構成なので、C言語のこのあたりを知ってないと理解しにくいかも。PythonにC言語っぽい作法が残っているのが不思議ですが・・・
ThreadとQueueを使ってキーボードの入力も作り直します。
#RaspberryPi #Python
0.005秒のsleepで動作周期を持たせたThreadで512個の整数を延々と加算してqueue.putに出力し、本処理では0.001秒のsleepで動作周期を持たせたqueue.get_nowaitで取り出しながら0.1秒毎に表示を更新しています。処理負荷が小さくメモリ使用量も安定していてスムーズです。本処理での時間軸の管理はアセンブラっぽいカウンタ処理ですが、厳密な処理周期は不要なのでsignalを使うほどでもありません。
Threadを使うメリットは高速化だと書く人が多いですが、私にとっては、処理によって違う要求時間を仕分け出来て、ポーリングだけど割り込みっぽいことが出来ることです。画面の更新はそれほど頻繁でなくていいけど、毎秒44回更新されるDMXの信号の処理は遅れたくないのですが、シングルスレッドでこの辺りを制御するのは案外面倒なのです。
気を付ける点はQueueのputやgetのタイミングです。Queueは変数ではなくFIFO特性のスタックなことが肝ですが、C言語のスタックやポインタにセマフォが混ざった構成なので、C言語のこのあたりを知ってないと理解しにくいかも。PythonにC言語っぽい作法が残っているのが不思議ですが・・・
ThreadとQueueを使ってキーボードの入力も作り直します。
#RaspberryPi #Python
RaspberryPiにRTC(リアル・タイム・クロックを取り付けてみました。
RaspberryPiは無電源だと時計が動きませんので、起動すると前回終了した時刻から時計がカウントされます。
これでは気持ちが悪いし、ファイルの更新時刻がおかしくなると開発作業ではトラブルのもとです。
リンクの商品以外にもRTCはいろいろありますが、この製品は小型でGPIOに挿すだけで使えて何かとよいと思います。安価だし。
設定方法はこのサイトがわかりやすいと思います。/boot/config.txtを更新した後に再起動を忘れずに。
#RaspberryPi
RaspberryPiは無電源だと時計が動きませんので、起動すると前回終了した時刻から時計がカウントされます。
これでは気持ちが悪いし、ファイルの更新時刻がおかしくなると開発作業ではトラブルのもとです。
リンクの商品以外にもRTCはいろいろありますが、この製品は小型でGPIOに挿すだけで使えて何かとよいと思います。安価だし。
設定方法はこのサイトがわかりやすいと思います。/boot/config.txtを更新した後に再起動を忘れずに。
#RaspberryPi
仮ですが、コマンド入力を作りました。
今回はArt-Netの受信データを表示することが目的なので、対象ユニバースを指示するだけの[ニーモニック-数値]のシンプルな物にしました。
Net,Subnet,Universeなどのニーモニックを[N][S][U]のキーで呼び出し、数値を打って[Enter]で確定です。それぞれのコマンドには設定数値の範囲がありますので、範囲外であればエラーというか「このコマンドの数値範囲はこうだよん」と表示する様にもしています。
#RaspberryPi #Python
今回はArt-Netの受信データを表示することが目的なので、対象ユニバースを指示するだけの[ニーモニック-数値]のシンプルな物にしました。
Net,Subnet,Universeなどのニーモニックを[N][S][U]のキーで呼び出し、数値を打って[Enter]で確定です。それぞれのコマンドには設定数値の範囲がありますので、範囲外であればエラーというか「このコマンドの数値範囲はこうだよん」と表示する様にもしています。
#RaspberryPi #Python
ANSIエスケープシーケンスは何とかモノになりました。
画面の試作段階ですから受信データを表示することは出来ませんので、仮のnumpy.arrayを加算し続ける処理で動きを確認しています。インクリメントした値の256の剰余(割った余り)です。
チラつくことなく求める動作をしていますし、画面処理の負荷は(topにて)7%くらい。いいんでないか?
ちなみにpi4のCPUは4coreなので、topコマンドでの最大値は400%です。
この後はArt-Netの受信とキー操作です。
Art-Netはsocket通信で受信したパケット(バイナリ)を適切に変換してデータ化するだけです。通信の難しいことはライブラリがやってくれるので、たぶん、それ程難しくはないと思います。
キー入力は最終的なコマンド実行までどう持っていくかです。様々な手順が考えられますが、どうやるのがいいかよく考えてみましょう。
#RaspberryPi #Python
画面の試作段階ですから受信データを表示することは出来ませんので、仮のnumpy.arrayを加算し続ける処理で動きを確認しています。インクリメントした値の256の剰余(割った余り)です。
チラつくことなく求める動作をしていますし、画面処理の負荷は(topにて)7%くらい。いいんでないか?
ちなみにpi4のCPUは4coreなので、topコマンドでの最大値は400%です。
この後はArt-Netの受信とキー操作です。
Art-Netはsocket通信で受信したパケット(バイナリ)を適切に変換してデータ化するだけです。通信の難しいことはライブラリがやってくれるので、たぶん、それ程難しくはないと思います。
キー入力は最終的なコマンド実行までどう持っていくかです。様々な手順が考えられますが、どうやるのがいいかよく考えてみましょう。
#RaspberryPi #Python
ANSIエスケープシーケンスのチラつきの原因がわかりました。
行削除です。コードは'\033[2K'。
上書きしないと文字が消えないので行を削除してから書いていたのですが、消すのではなく空白で上書きすることで解決しました。
いやはや。
#RaspberryPi #Python
行削除です。コードは'\033[2K'。
上書きしないと文字が消えないので行を削除してから書いていたのですが、消すのではなく空白で上書きすることで解決しました。
いやはや。
#RaspberryPi #Python