 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
時系列順[862件](18ページ目)
2022年3月 この範囲を新しい順で読む この範囲をファイルに出力する
オレメモ
Pythonのsocket.recvfromでタイムアウト処理をする。
socketのインスタンスをsockとした場合、sock.recvfromの前に
sock.settimeout(<タイムアウトの秒数>)
とする。
sock.recvfrom(<バッファ数>) を try: で実行し、except socket.timeout: でタイムアウトエラーを拾う。
#Python
Pythonのsocket.recvfromでタイムアウト処理をする。
socketのインスタンスをsockとした場合、sock.recvfromの前に
sock.settimeout(<タイムアウトの秒数>)
とする。
sock.recvfrom(<バッファ数>) を try: で実行し、except socket.timeout: でタイムアウトエラーを拾う。
#Python
実機を離れて考えを進めると抜けが見えてきます。
一つ前のオレメモはArt-Netを受信していないときの対策です。タイムアウトを設定しませんと延々と待つだけの無限ループになり、適切な終了すら出来なくなります。一定時間受信が無いならそれをユーザーに伝えることも大切な処理です。
その前の送信元が複数になった時の対策もそうです。ミキサー機能が無いと謳っても複数の接続をする人が居ないとも限りませんし、そんな人に限って勝手な想像通りに動かないと作った奴が悪いとかダメな製品だとかレッテルを貼ってくるものです。この件については副産物としてミキサー機能に至れそうな可能性が見えましたので「災い転じて何とやら」ですが、先入観を排除して可能性を熟慮することの大切さを改めて痛感です。
受信処理は試行錯誤しながらディレイを可能にしたことでソースコードが読みにくくなってきましたので、タイムアウトと複数の送信元への対応を加えながら読みやすく書き直しです。
パラメータが増えてくると変数の命名に配慮するだけでも読みやすさが違ってきますので、この辺りも含めてよく考えていきます。
ここまでやってきて、思った以上に受信処理が大切なことに驚いています。
ミキサーしかり、ディレイしかり、思い描いている機能の大半が受信直後の処理にかかっていたとは当初は全く思いもしませんでした。
この辺りは所詮アマチュアの所業でありますが、まだまだ修行です。
#Python #[Art-Net]
一つ前のオレメモはArt-Netを受信していないときの対策です。タイムアウトを設定しませんと延々と待つだけの無限ループになり、適切な終了すら出来なくなります。一定時間受信が無いならそれをユーザーに伝えることも大切な処理です。
その前の送信元が複数になった時の対策もそうです。ミキサー機能が無いと謳っても複数の接続をする人が居ないとも限りませんし、そんな人に限って勝手な想像通りに動かないと作った奴が悪いとかダメな製品だとかレッテルを貼ってくるものです。この件については副産物としてミキサー機能に至れそうな可能性が見えましたので「災い転じて何とやら」ですが、先入観を排除して可能性を熟慮することの大切さを改めて痛感です。
受信処理は試行錯誤しながらディレイを可能にしたことでソースコードが読みにくくなってきましたので、タイムアウトと複数の送信元への対応を加えながら読みやすく書き直しです。
パラメータが増えてくると変数の命名に配慮するだけでも読みやすさが違ってきますので、この辺りも含めてよく考えていきます。
ここまでやってきて、思った以上に受信処理が大切なことに驚いています。
ミキサーしかり、ディレイしかり、思い描いている機能の大半が受信直後の処理にかかっていたとは当初は全く思いもしませんでした。
この辺りは所詮アマチュアの所業でありますが、まだまだ修行です。
#Python #[Art-Net]
オレメモ
● Art-Netの受信の準備でするべきこと。
・受信のタイムアウトを定義し、タイムアウトを例外としてキチンと処理する。
● Art-Netを受信したらするべきこと。
・受信した「Art-Netのバイナリデータ」に「いつ」「どこからか(送信元)」を絡めて受信データとする。
・ユニバースと内部ルートの対照データを基に、データの参照キーを「ユニバース」から「ルート」に変換してキャッシュする。
・「いつ」をキーに送信元からの送信が無くなったと見なせるならキャッシュも含め送信元情報を消去する。
・「いつ」をキーにキャッシュの有効期限が切れたならキャッシュのレベル値をすべてゼロにする。
・送信元ごとのキャッシュをルートで丸めて一意のキャッシュにする。
#[Art-Net]
● Art-Netの受信の準備でするべきこと。
・受信のタイムアウトを定義し、タイムアウトを例外としてキチンと処理する。
● Art-Netを受信したらするべきこと。
・受信した「Art-Netのバイナリデータ」に「いつ」「どこからか(送信元)」を絡めて受信データとする。
・ユニバースと内部ルートの対照データを基に、データの参照キーを「ユニバース」から「ルート」に変換してキャッシュする。
・「いつ」をキーに送信元からの送信が無くなったと見なせるならキャッシュも含め送信元情報を消去する。
・「いつ」をキーにキャッシュの有効期限が切れたならキャッシュのレベル値をすべてゼロにする。
・送信元ごとのキャッシュをルートで丸めて一意のキャッシュにする。
#[Art-Net]
オレメモ
受信時に得られるArt-Netの情報
・Art-Netパケットのバイナリデータ
・送信元IPv4アドレス
・受信日時
指示データ
・ユニバースとルートの対照マップ
受信処理のアウトプット
・ルートで仕訳けた直近の受信値(直近値)
処理の第一段階
・バイナリデータのデコード
・インデックスをユニバースからルートへ変換
処理の第二段階
・送信元を有効期限でフィルタ出来るキャッシュ
・送信元ごとに、デコードしたデータを有効期限でフィルタ出来るキャッシュ
処理の第三段階
・送信元を有効期限でフィルタ(送信元が期限切れなら受信データもクリア)
・受信データを有効期限でフィルタ
処理の第四段階
・送信元ごとの受信データを一つにまとめ、ルート単位の直近値とする(実質ミックス処理)
処理の第五段階
・直近値を次に渡す
#[Art-Net]
受信時に得られるArt-Netの情報
・Art-Netパケットのバイナリデータ
・送信元IPv4アドレス
・受信日時
指示データ
・ユニバースとルートの対照マップ
受信処理のアウトプット
・ルートで仕訳けた直近の受信値(直近値)
処理の第一段階
・バイナリデータのデコード
・インデックスをユニバースからルートへ変換
処理の第二段階
・送信元を有効期限でフィルタ出来るキャッシュ
・送信元ごとに、デコードしたデータを有効期限でフィルタ出来るキャッシュ
処理の第三段階
・送信元を有効期限でフィルタ(送信元が期限切れなら受信データもクリア)
・受信データを有効期限でフィルタ
処理の第四段階
・送信元ごとの受信データを一つにまとめ、ルート単位の直近値とする(実質ミックス処理)
処理の第五段階
・直近値を次に渡す
#[Art-Net]
RaspberryPiからレガシーDMXを出力する方法を妄想しています。
直接出すのは無理があります。UARTはありますが、2系統出すのが関の山。BreakTimeも出しにくい。
ならば、RaspberryPiからはSPIで出力し、PICで250kbpsのUARTに変換するのがいいかなと。
RaspberryPiからCS(チップセレクト)を使ってPICを選択するのがノーマルな方法ですが、レガシーDMXを出来る限り数多くだすには効率が悪い。SPIを休みなく送りつけたらPICは処理しきれませんので1ワード毎に休み時間を入れないといけない。また、PIC1個毎に一気にデータを送り付けるにはPICがデータをキャッシュ出来なければなりませんが、512バイト以上のメモリを持ったPICは選択肢が少なくピン数も多い。
しかるに、SPIを普通に使ったら2系統扱うのが限界だと思われます。
で、考えた方法が、複数のPIC(レガシーDMX1系統に付き1個使用)がRaspberryPiから1個に見える方法です。
RaspberryPiからは複数のユニバースのデータを適切に並べ替えて一気に送出します。RaspberryPiにとっては一番ストレスが無い方法です。
もちろんPICはこれを捌くことが出来ませんから、RaspberryPiとPICの間に仕掛けを入れます。
SPIはクロック同期型の送信方法ですからデータ線の他にクロック線があります。受信はクロックによって実行されますので、CSがアクティブでも、データ線に変化があっても、クロックが伴わなければ何も起こりません。通常ならCSを用いて受信先を決定しますが、クロックの出力先を仕分けても同じことです。
送信が始まって1から8カウントの間は1番目のPICへSPIのクロックを送り、9から16カウントの間は2番目のPICへSPIのクロックを送り・・・以下末番のPICまで繰り返します。RaspberryPiから送信があっても、クロックが行かない受信器にとってはワードとワードの間の休み時間でしかありません。
これなら、送信するRaspberryPiからはPIC達が1個に見え、受信するPIC達には自分宛のデータがだけが届きます。RaspberryPiが休みなく送信してもPIC側は他が受信している間に処理を進められますし、RaspberryPiの送信タイミングが適切であれば受信したSPIのデータをUARTに渡すだけでPIC内でのスタックは不要です。ピン数が少ないPIC12F1822でも対応可能ということ。
これを実現するクロックの仕分けは汎用ロジックICで行います。
バイナリカウンタ74HC4040
3to8 ラインデコーダ TC74HC138
この二つです。
数日前はGALを使おうかと思ったのですが、16ピンの汎用ロジック2個で可能ならこちらの方がいいかと。ファームウェア書かなくていいし、安いし、30年以上確実に動くし。
バイナリカウンタはクロックをカウントして2進数相当の出力をするICです。これにSPIクロックを入力し、下から4~6bit目の出力を使います。SPIクロックの8倍周期でカウントされる3bitのバイナリと見なせます。
8倍周期の3bitのバイナリをラインデコーダに入れます。ラインデコーダは入力された3bitのバイナリに相当するピンだけ出力します。このデコーダにSPIのクロックも入れれば8カウント毎に送り先が切り替わるクロックが出力されます。
SPIのモードは74HC4040の特性に合わせてmode3がよいと思われます。
文章で伝わりにくいのは承知していますが、アイデアがまとまってスッキリした。
オレメモってことで。
整理しきらないとモヤモヤして本業が手に付かなかったので回路図を描いてみました。気分スッキリ。
折角なので揚げてみました。
クリックして表示されるモノはぼやけてしまいますので、回路を追いたい方はサムネのリンク先の画像本体をダウンロードして見てください。
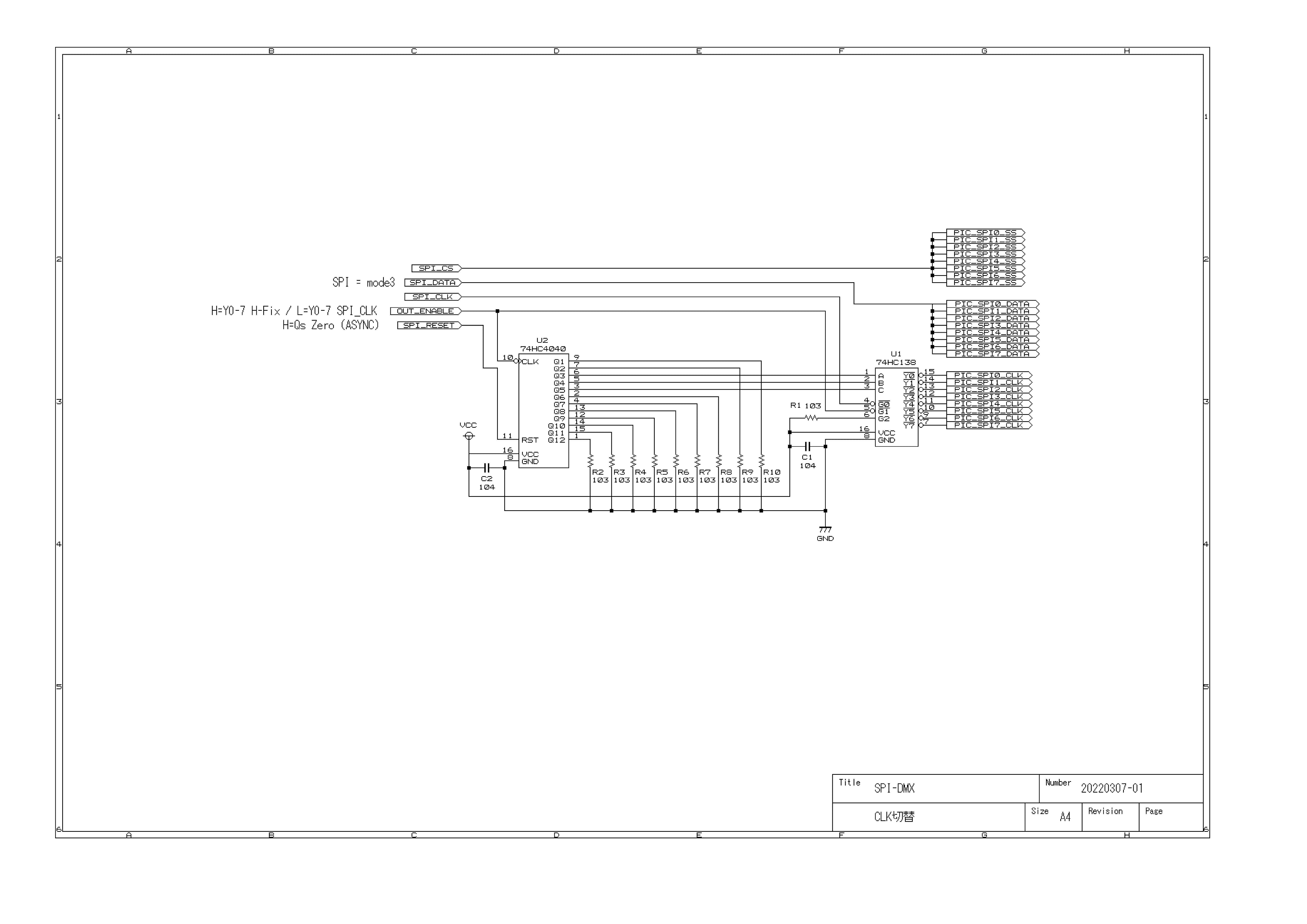
追記
回路図に間違い発見!
74HC4040のCLKにはSPI_CLKが入らないといけません。
74HC4040から74HC138のA,B,Cに行くのもQ4,Q5,Q6です。なら74HC4020でもいいな。
データは手直ししましたが、ここに再アップするのは面倒。まぁいいか。
さらに追記
クロックカウントの考え方が根本的に間違っているような気が・・・74HC4040(4020)のカウントの進み方がズレてね?最初のビットをサンプリングする前に1カウントされてしまうぞ。
ならばSPIをmode0で使えばいいか?mode0ならアイドル・ローだから74HC138ではなく74HC238か?
考え直し。
#電子工作 #RaspberryPi
直接出すのは無理があります。UARTはありますが、2系統出すのが関の山。BreakTimeも出しにくい。
ならば、RaspberryPiからはSPIで出力し、PICで250kbpsのUARTに変換するのがいいかなと。
RaspberryPiからCS(チップセレクト)を使ってPICを選択するのがノーマルな方法ですが、レガシーDMXを出来る限り数多くだすには効率が悪い。SPIを休みなく送りつけたらPICは処理しきれませんので1ワード毎に休み時間を入れないといけない。また、PIC1個毎に一気にデータを送り付けるにはPICがデータをキャッシュ出来なければなりませんが、512バイト以上のメモリを持ったPICは選択肢が少なくピン数も多い。
しかるに、SPIを普通に使ったら2系統扱うのが限界だと思われます。
で、考えた方法が、複数のPIC(レガシーDMX1系統に付き1個使用)がRaspberryPiから1個に見える方法です。
RaspberryPiからは複数のユニバースのデータを適切に並べ替えて一気に送出します。RaspberryPiにとっては一番ストレスが無い方法です。
もちろんPICはこれを捌くことが出来ませんから、RaspberryPiとPICの間に仕掛けを入れます。
SPIはクロック同期型の送信方法ですからデータ線の他にクロック線があります。受信はクロックによって実行されますので、CSがアクティブでも、データ線に変化があっても、クロックが伴わなければ何も起こりません。通常ならCSを用いて受信先を決定しますが、クロックの出力先を仕分けても同じことです。
送信が始まって1から8カウントの間は1番目のPICへSPIのクロックを送り、9から16カウントの間は2番目のPICへSPIのクロックを送り・・・以下末番のPICまで繰り返します。RaspberryPiから送信があっても、クロックが行かない受信器にとってはワードとワードの間の休み時間でしかありません。
これなら、送信するRaspberryPiからはPIC達が1個に見え、受信するPIC達には自分宛のデータがだけが届きます。RaspberryPiが休みなく送信してもPIC側は他が受信している間に処理を進められますし、RaspberryPiの送信タイミングが適切であれば受信したSPIのデータをUARTに渡すだけでPIC内でのスタックは不要です。ピン数が少ないPIC12F1822でも対応可能ということ。
これを実現するクロックの仕分けは汎用ロジックICで行います。
バイナリカウンタ74HC4040
3to8 ラインデコーダ TC74HC138
この二つです。
数日前はGALを使おうかと思ったのですが、16ピンの汎用ロジック2個で可能ならこちらの方がいいかと。ファームウェア書かなくていいし、安いし、30年以上確実に動くし。
バイナリカウンタはクロックをカウントして2進数相当の出力をするICです。これにSPIクロックを入力し、下から4~6bit目の出力を使います。SPIクロックの8倍周期でカウントされる3bitのバイナリと見なせます。
8倍周期の3bitのバイナリをラインデコーダに入れます。ラインデコーダは入力された3bitのバイナリに相当するピンだけ出力します。このデコーダにSPIのクロックも入れれば8カウント毎に送り先が切り替わるクロックが出力されます。
SPIのモードは74HC4040の特性に合わせてmode3がよいと思われます。
文章で伝わりにくいのは承知していますが、アイデアがまとまってスッキリした。
オレメモってことで。
整理しきらないとモヤモヤして本業が手に付かなかったので回路図を描いてみました。気分スッキリ。
折角なので揚げてみました。
クリックして表示されるモノはぼやけてしまいますので、回路を追いたい方はサムネのリンク先の画像本体をダウンロードして見てください。
追記
回路図に間違い発見!
74HC4040のCLKにはSPI_CLKが入らないといけません。
74HC4040から74HC138のA,B,Cに行くのもQ4,Q5,Q6です。なら74HC4020でもいいな。
データは手直ししましたが、ここに再アップするのは面倒。まぁいいか。
さらに追記
クロックカウントの考え方が根本的に間違っているような気が・・・74HC4040(4020)のカウントの進み方がズレてね?最初のビットをサンプリングする前に1カウントされてしまうぞ。
ならばSPIをmode0で使えばいいか?mode0ならアイドル・ローだから74HC138ではなく74HC238か?
考え直し。
#電子工作 #RaspberryPi
妄想は続けておりますが、本業がそれなりに忙しくなってきました。
現場の日程はそうでもないのですが、「やっぱり開催しよう」的な話が多く準備期間が短い。時間が無いだけならまだいいですが、主催者も混乱しているのが必要が情報がなかなか来ない。知らないウチに話が変わっているなんてこともザラ。前もって大枠はまとめておくとしても、直前に手直しやり直しになるならギリギリまで寝かせても同じこと。「夏休みの宿題は始業式の前の日から」状態です。
そんな渦中の気分転換が工作ってのもおかしな人だと思いますが、趣味趣向は人それぞれってことで。
反動でアイデアが出まくるのは嬉しいやら困るやら・・・
#日常
現場の日程はそうでもないのですが、「やっぱり開催しよう」的な話が多く準備期間が短い。時間が無いだけならまだいいですが、主催者も混乱しているのが必要が情報がなかなか来ない。知らないウチに話が変わっているなんてこともザラ。前もって大枠はまとめておくとしても、直前に手直しやり直しになるならギリギリまで寝かせても同じこと。「夏休みの宿題は始業式の前の日から」状態です。
そんな渦中の気分転換が工作ってのもおかしな人だと思いますが、趣味趣向は人それぞれってことで。
反動でアイデアが出まくるのは嬉しいやら困るやら・・・
#日常
RaspberryPiでレガシーDMXを送出する装置のクロック切替器の回路図を訂正しました。
細かい誤植の訂正とロジックICの変更です。
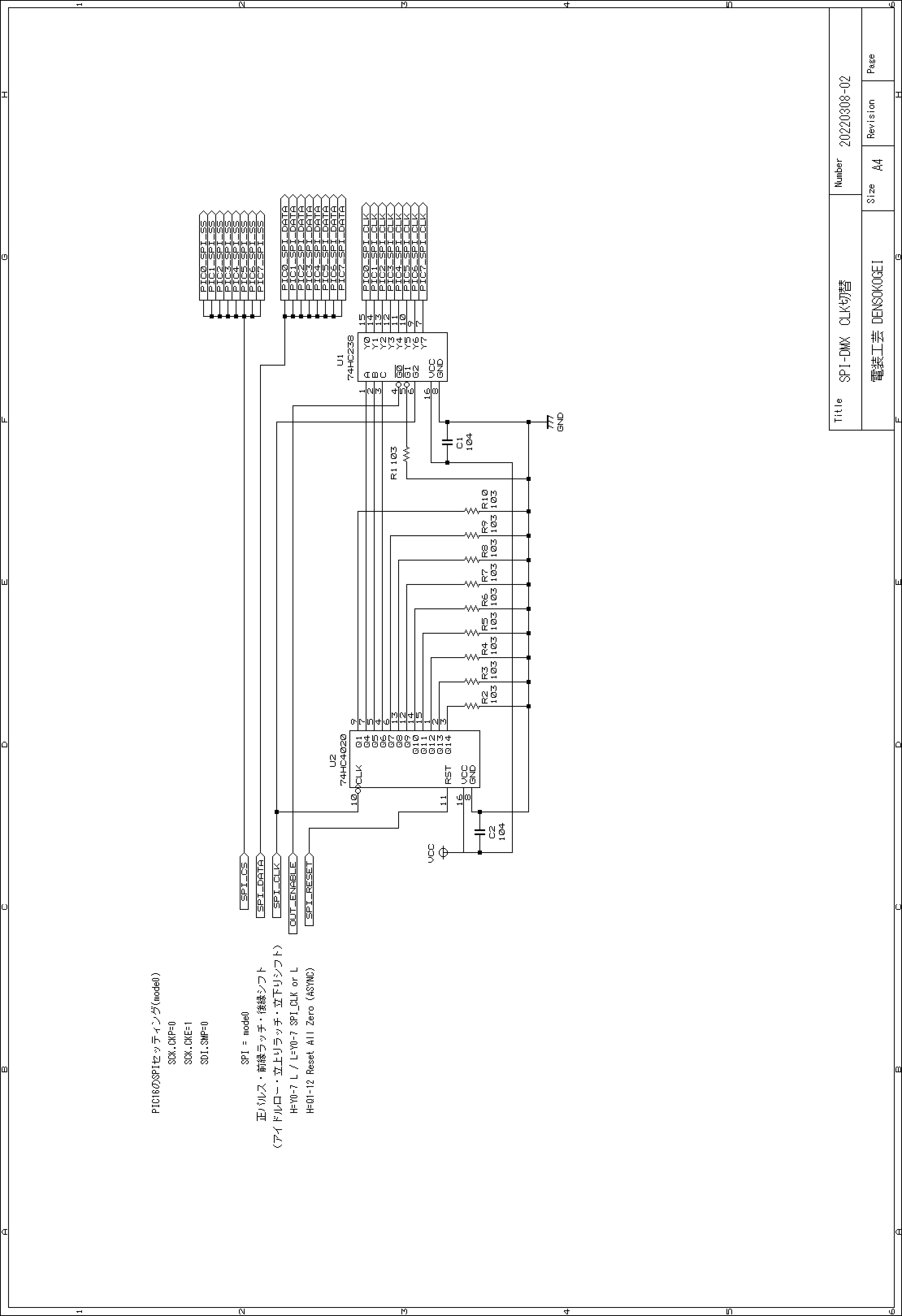
#電子工作
細かい誤植の訂正とロジックICの変更です。
#電子工作
オレメモ
RaspberryPiのSPIバッファサイズ
※出展:「RasPi 3B+ で最新の spidev_test を使う」
--------
現在の最大転送サイズを確認
$ cat /sys/module/spidev/parameters/bufsiz
4096 (byte)
これが固定値で変更不可といった書き込みが少なくありませんが変更可能です。
変更するには、/boot/cmdline.txt に下記変数を追加。
spidev.bufsiz=<サイズ数値>
拡大可能なサイズ
4096: OK (デフォルト)
16384: OK
65536: OK
1048576: OK (1MB)
4194304: OK (4MB) ⇒ 最大値 (これ以上を設定しても拡大しない)
--------
RaspberryPi4Bも同様だと思いますが、実機で確認してみましょう。
DMX512を8系統出そうと思っていますが、StartCodeやBreakTimeもSPIで送出するので4096バイトでは不足です。
試したところOKでした。
変更するファイルは/boot/cmdline.txtであって/boot/config.txtではありません。
開くと1行にいろいろなコマンドが書いてあります。このコマンド列の末尾に空白を入れてspidev.bufsiz=<サイズ数値>を記述します。
#RaspberryPi
RaspberryPiのSPIバッファサイズ
※出展:「RasPi 3B+ で最新の spidev_test を使う」
--------
現在の最大転送サイズを確認
$ cat /sys/module/spidev/parameters/bufsiz
4096 (byte)
これが固定値で変更不可といった書き込みが少なくありませんが変更可能です。
変更するには、/boot/cmdline.txt に下記変数を追加。
spidev.bufsiz=<サイズ数値>
拡大可能なサイズ
4096: OK (デフォルト)
16384: OK
65536: OK
1048576: OK (1MB)
4194304: OK (4MB) ⇒ 最大値 (これ以上を設定しても拡大しない)
--------
RaspberryPi4Bも同様だと思いますが、実機で確認してみましょう。
DMX512を8系統出そうと思っていますが、StartCodeやBreakTimeもSPIで送出するので4096バイトでは不足です。
試したところOKでした。
変更するファイルは/boot/cmdline.txtであって/boot/config.txtではありません。
開くと1行にいろいろなコマンドが書いてあります。このコマンド列の末尾に空白を入れてspidev.bufsiz=<サイズ数値>を記述します。
#RaspberryPi
SPIでレガシーDMXを出力する回路の基本要素は揃いました。PICをプログラムして実験する段階です。
本業が忙しくなってしまったので棚上げですが、PICの基本設計は進めましょう。
PICは12F1822を使います。PIC12とありますが、PIC16系の8ピン版と思っていい製品です。
ピンアサインは次の通りです。
拡張ミッドレンジPICにはモジュールのアサインピンをある程度切り替えられる機能があります。
TRISとはI/Oピンの入出力方向を設定する要素です。
VDD
VSS(GND)
RA0 TX_Pilot_LED TRIS-OUTPUT(汎用I/Oとして使い、送信が行われるとLEDを点灯させます)
RA1 SPI.SCK TRIS-INPUT
RA2 SPI.SDI TRIS-INPUT
RA3 DMX.RESET TRIS-INPUT
RA4 USART.TX TRIS-OUTPUT(ただし、BreakTimeを作るためにINPUTにすることがあります)
RA5 CSC1 TRIS-INPUT(クロックの設定は優先順位が高いので、TRISはどちらでも機能します)
これには隠れたコツがあります。
SPIを使うならSPI.SDOがあります。使わないI/Oですがどこかにアサインしなければなりませんので、USART.TXと同じRA4にアサインします。被って出力がおかしくなりそうですが、SPIよりも優先順位が高いUSART.TXが出力されますから大丈夫。逆だったら困りましたけどね。
クロック発信子にはクリスタルオシレータ(8MHz)SG-8002DC(3.3V)を使います。普段はPIC1個に対し水晶発振子を1個使うのですが、今回は同じクロックレートで動く複数のPICを1枚の基板に載せますので、部品点数を減らす意味も含めてこれを使います。PICのI/Oピンも減るし。
#電子工作
本業が忙しくなってしまったので棚上げですが、PICの基本設計は進めましょう。
PICは12F1822を使います。PIC12とありますが、PIC16系の8ピン版と思っていい製品です。
ピンアサインは次の通りです。
拡張ミッドレンジPICにはモジュールのアサインピンをある程度切り替えられる機能があります。
TRISとはI/Oピンの入出力方向を設定する要素です。
VDD
VSS(GND)
RA0 TX_Pilot_LED TRIS-OUTPUT(汎用I/Oとして使い、送信が行われるとLEDを点灯させます)
RA1 SPI.SCK TRIS-INPUT
RA2 SPI.SDI TRIS-INPUT
RA3 DMX.RESET TRIS-INPUT
RA4 USART.TX TRIS-OUTPUT(ただし、BreakTimeを作るためにINPUTにすることがあります)
RA5 CSC1 TRIS-INPUT(クロックの設定は優先順位が高いので、TRISはどちらでも機能します)
これには隠れたコツがあります。
SPIを使うならSPI.SDOがあります。使わないI/Oですがどこかにアサインしなければなりませんので、USART.TXと同じRA4にアサインします。被って出力がおかしくなりそうですが、SPIよりも優先順位が高いUSART.TXが出力されますから大丈夫。逆だったら困りましたけどね。
クロック発信子にはクリスタルオシレータ(8MHz)SG-8002DC(3.3V)を使います。普段はPIC1個に対し水晶発振子を1個使うのですが、今回は同じクロックレートで動く複数のPICを1枚の基板に載せますので、部品点数を減らす意味も含めてこれを使います。PICのI/Oピンも減るし。
#電子工作
PICでDMX512を出力する際、面倒なのがBreakTimeです。
一般的なUARTでDMX512の様に長いBreakTimeが使われることは無いためか、PICにはそのような機能がありません。何らかのチカラ技で作らないといけません。
私が最終的にたどり着いた方法は、
1)USARTが出力されるI/Oピンをプルダウンしてアイドル・ローにしておく。
2)BreakTimeは0x00の空送信で作る。ただし、0x00送信でもStopBit(H)が発生するので、以下(3)の方法で消す。
3)BreakTimeの空送信が始まってからStopBitが始まるまでの間(Lが続く間)にTRIS(I/Oピンの入出力方向を決めるフラグ)を入力に切り替える。入力にするとI/Oピンがハイインピーダンス(Z)になり、プルダウンされているためRS485ドライバに届く信号はLを維持する。
4)BreakTimeの時間に相当する空送信する。
5)BreakTimeの終わりというか次のフレームの送信開始前に0x00を送信してTRISを出力に切り替える。0x00送信のStopBitがMarkAfterBreakとなる。ただ、MarkAfterBreakは少し長い方が安定するので、0xCO(b11000000)などのMSB詰めの数値を使ってMarkAfterBreakを長くしてもいい。
といった内容です。
これならタイマー処理をせずにBreakTimeを作れます。
BreakTimeを表すデータをBreakTimeZero、BreakTimeZeroの始まりのバイトをBreakTimeNose、最後をBreakTimeTailと勝手に呼んでますが、RaspberryPiからのSPIデータをBreakTimeTailから始まるモノにしておけばPIC側の処理は凄く簡単です。
0)RaspberryPiからRESET信号(実際にはCSを用いる)をPICに送り、PICはこれを見て送信カウンタをクリアしてUSART.TXピンのTRISを入力に切り替えておく。アイドル・ロー。
1)SPIの最初のバイト(BreakTimeTail)を受信したら、USARTに渡して送信し、3bit分待ってからUSART.TXピンのTRISを出力に切り替える。以下、受信値を1バイト送信するごとに送信カウンタをインクリメントする。
2)512スロットを送信した後のバイトはBreakTimeNoseになる。ただ、PICのUSARTは1ワード分のキャッシュを持っているので、BreakTimeZeroの2バイト目をUSARTに渡した後(BreakTimeNoseが送信開始された後)、3bit分待ってからTRISを入力に切り替えてBrakTimeとする。送信制御は送信カウンタを用いる。
3)以下、SPIのデータが終了(RaspberryPiからのCSで確認)したら、送信カウンタをクリアしてSPIを受信待機にする。=>(1)に戻る。
4)BreakTimeZeroを送信する前にSPIが終わってしまったらエラー。TRISを入力に切り替えてBrakTimeにしておくなど、エラー処理を行う。
5)TRISの切り替えの前に3bit分待つのは、次の送信バイトの受け入れがStopBit中に可能になるからです。
こんな感じかな。
#電子工作
一般的なUARTでDMX512の様に長いBreakTimeが使われることは無いためか、PICにはそのような機能がありません。何らかのチカラ技で作らないといけません。
私が最終的にたどり着いた方法は、
1)USARTが出力されるI/Oピンをプルダウンしてアイドル・ローにしておく。
2)BreakTimeは0x00の空送信で作る。ただし、0x00送信でもStopBit(H)が発生するので、以下(3)の方法で消す。
3)BreakTimeの空送信が始まってからStopBitが始まるまでの間(Lが続く間)にTRIS(I/Oピンの入出力方向を決めるフラグ)を入力に切り替える。入力にするとI/Oピンがハイインピーダンス(Z)になり、プルダウンされているためRS485ドライバに届く信号はLを維持する。
4)BreakTimeの時間に相当する空送信する。
5)BreakTimeの終わりというか次のフレームの送信開始前に0x00を送信してTRISを出力に切り替える。0x00送信のStopBitがMarkAfterBreakとなる。ただ、MarkAfterBreakは少し長い方が安定するので、0xCO(b11000000)などのMSB詰めの数値を使ってMarkAfterBreakを長くしてもいい。
といった内容です。
これならタイマー処理をせずにBreakTimeを作れます。
BreakTimeを表すデータをBreakTimeZero、BreakTimeZeroの始まりのバイトをBreakTimeNose、最後をBreakTimeTailと勝手に呼んでますが、RaspberryPiからのSPIデータをBreakTimeTailから始まるモノにしておけばPIC側の処理は凄く簡単です。
0)RaspberryPiからRESET信号(実際にはCSを用いる)をPICに送り、PICはこれを見て送信カウンタをクリアしてUSART.TXピンのTRISを入力に切り替えておく。アイドル・ロー。
1)SPIの最初のバイト(BreakTimeTail)を受信したら、USARTに渡して送信し、3bit分待ってからUSART.TXピンのTRISを出力に切り替える。以下、受信値を1バイト送信するごとに送信カウンタをインクリメントする。
2)512スロットを送信した後のバイトはBreakTimeNoseになる。ただ、PICのUSARTは1ワード分のキャッシュを持っているので、BreakTimeZeroの2バイト目をUSARTに渡した後(BreakTimeNoseが送信開始された後)、3bit分待ってからTRISを入力に切り替えてBrakTimeとする。送信制御は送信カウンタを用いる。
3)以下、SPIのデータが終了(RaspberryPiからのCSで確認)したら、送信カウンタをクリアしてSPIを受信待機にする。=>(1)に戻る。
4)BreakTimeZeroを送信する前にSPIが終わってしまったらエラー。TRISを入力に切り替えてBrakTimeにしておくなど、エラー処理を行う。
5)TRISの切り替えの前に3bit分待つのは、次の送信バイトの受け入れがStopBit中に可能になるからです。
こんな感じかな。
#電子工作