 電装工芸日記
- 舞台照明機器の製作とか -
電装工芸日記
- 舞台照明機器の製作とか -
全年全月14日の投稿[45件](3ページ目)
2023年6月 この範囲を時系列順で読む この範囲をファイルに出力する
LTC Generator は30fpsも他のfpsと同様の誤差でした。時間の勘定に期待値が出たので PIC のファームウェアは一応の完成とします。あとは、卓が認識するかです。
今後はPC側のアプリケーションの製作です。Pythonベースでvlcライブラリを使い、LTCとVLCは同時スタートの疑似シンクです。VLCの現在時からLTCを生成することは難しいからです。途中スタートではLTCの現在時からVLCの開始時を補正して合わせる様にします。
音声ファイルはプレイリストとしてまとめ、スタートタイム、エンドタイム、ボリューム、連続再生、曲間時間などを個別に設定出来る様にします。複数の音声ファイルを並列で再生する用途は想定しませんので、1トラックのわかりやすいモノを目指します。もちろん、LTCのタイムが被らない様にチェックする機能も大切です。
#タイムコード
今後はPC側のアプリケーションの製作です。Pythonベースでvlcライブラリを使い、LTCとVLCは同時スタートの疑似シンクです。VLCの現在時からLTCを生成することは難しいからです。途中スタートではLTCの現在時からVLCの開始時を補正して合わせる様にします。
音声ファイルはプレイリストとしてまとめ、スタートタイム、エンドタイム、ボリューム、連続再生、曲間時間などを個別に設定出来る様にします。複数の音声ファイルを並列で再生する用途は想定しませんので、1トラックのわかりやすいモノを目指します。もちろん、LTCのタイムが被らない様にチェックする機能も大切です。
#タイムコード
2023年4月 この範囲を時系列順で読む この範囲をファイルに出力する
教科書に反する使い方なのでツッコミ所はありますが、アイデアがあるなら実験は大事です。
ビデオカメラのフリッカーは蛍光灯より酷そうだけど・・・。
調光器が壊れる可能性はありますが、SCRでスイッチングしたらどうなるか試してみたいですねぇ~。
ダイオードブリッジと大型コンデンサでAC100vから起こしたDC141vを使ったらどうなるんでしょうね。200vの大型コンデンサが余っているので、リップルは気にせず爆発覚悟で試したいかも。
つか、DC141vをパワーMOS-FETでスイッチングしたら調光できんぢゃね?電源が暴走して400vくらい出すかもだけどwww
この使い方はLED素子のポテンシャルを100%引き出せませんが、100%でなくてもいいんですよ。費用対効果が成り立って安全が確保出来て十分に明かるければソレでいいのです。
考えようです。
#LED
ビデオカメラのフリッカーは蛍光灯より酷そうだけど・・・。
調光器が壊れる可能性はありますが、SCRでスイッチングしたらどうなるか試してみたいですねぇ~。
ダイオードブリッジと大型コンデンサでAC100vから起こしたDC141vを使ったらどうなるんでしょうね。200vの大型コンデンサが余っているので、リップルは気にせず爆発覚悟で試したいかも。
つか、DC141vをパワーMOS-FETでスイッチングしたら調光できんぢゃね?電源が暴走して400vくらい出すかもだけどwww
この使い方はLED素子のポテンシャルを100%引き出せませんが、100%でなくてもいいんですよ。費用対効果が成り立って安全が確保出来て十分に明かるければソレでいいのです。
考えようです。
#LED
3Dプリンタの条件が出たようです。
六角スペーサーを差し込む穴の寸法で難儀してました。M3の六角は5.5mmですから5.6mmくらいの仕上がりにしたいのですが、CAD上で5.6mmとしても仕上がりは5.6mmになりません。今回は5.9mmにして仕上がり5.6mm強でした。ぢゃ0.3mmふかすのが定数かというとそうでもなく、内形か外形かでも違いますし、周囲の肉厚によっても違います。目安にはなるものの試作を繰り返して追い込まなければなりません。
FDM式の3Dプリンタは溶かした樹脂でプロッタように線を描いていくのですが、描画した樹脂の幅には±0.2mm程度の誤差があるようです。内形寸法では対角で合わせて倍の誤差になりますので、今回の狙い寸法に対しては比率的に大きい値です。ただ幸いなのは、プリントの度に寸法が違うことはほとんど無いことです。誤差ではなく、プリンタとフィラメントの組み合わせによる特性と呼ぶのが正しいのかもしれません。補正設定がCAMにあるかもしれませんので調べてみましょう。
#3Dプリンタ
六角スペーサーを差し込む穴の寸法で難儀してました。M3の六角は5.5mmですから5.6mmくらいの仕上がりにしたいのですが、CAD上で5.6mmとしても仕上がりは5.6mmになりません。今回は5.9mmにして仕上がり5.6mm強でした。ぢゃ0.3mmふかすのが定数かというとそうでもなく、内形か外形かでも違いますし、周囲の肉厚によっても違います。目安にはなるものの試作を繰り返して追い込まなければなりません。
FDM式の3Dプリンタは溶かした樹脂でプロッタように線を描いていくのですが、描画した樹脂の幅には±0.2mm程度の誤差があるようです。内形寸法では対角で合わせて倍の誤差になりますので、今回の狙い寸法に対しては比率的に大きい値です。ただ幸いなのは、プリントの度に寸法が違うことはほとんど無いことです。誤差ではなく、プリンタとフィラメントの組み合わせによる特性と呼ぶのが正しいのかもしれません。補正設定がCAMにあるかもしれませんので調べてみましょう。
#3Dプリンタ
2023年3月 この範囲を時系列順で読む この範囲をファイルに出力する
ライトアップの架台を作っています。
道路の分離帯みたいなところに生えている桜をライトアップするのですが条件が厳しい。
1)桜の根が傷むから地面にアンカー類は打たないこと。
2)(1)と同じ理由で土壌に加重を掛けないこと。
3)桜の幹に縛り付けるような取り付けをしないこと。
4)歩道、道路にはみ出さないこと。
5)アスファルトやコンクリート、縁石に穴を空けないこと。
6)現状復帰は厳重にすること。
桜の保全を優先するなら真っ当なご指示なんですが、灯具を宙に浮かすのかい?って話です。
唯一可能なのは、分離帯を囲む縁石に金具をクランプして荷重を掛けつつ固定する方法。
しかし、土壌は縁石の上面ギリギリまで攻めており、縁石自体傾いたりしています。
方針は、
1)縁石と土壌の間に薄い鉄板を打ち込む特殊なコの字クランプを構成する。
2)クランプから架台本体への繋がりには2軸の自在関節を入れる。
となります。
言うのは簡単ですが、私が出来る加工と予算の範囲でこんな物を作れるのかいな?
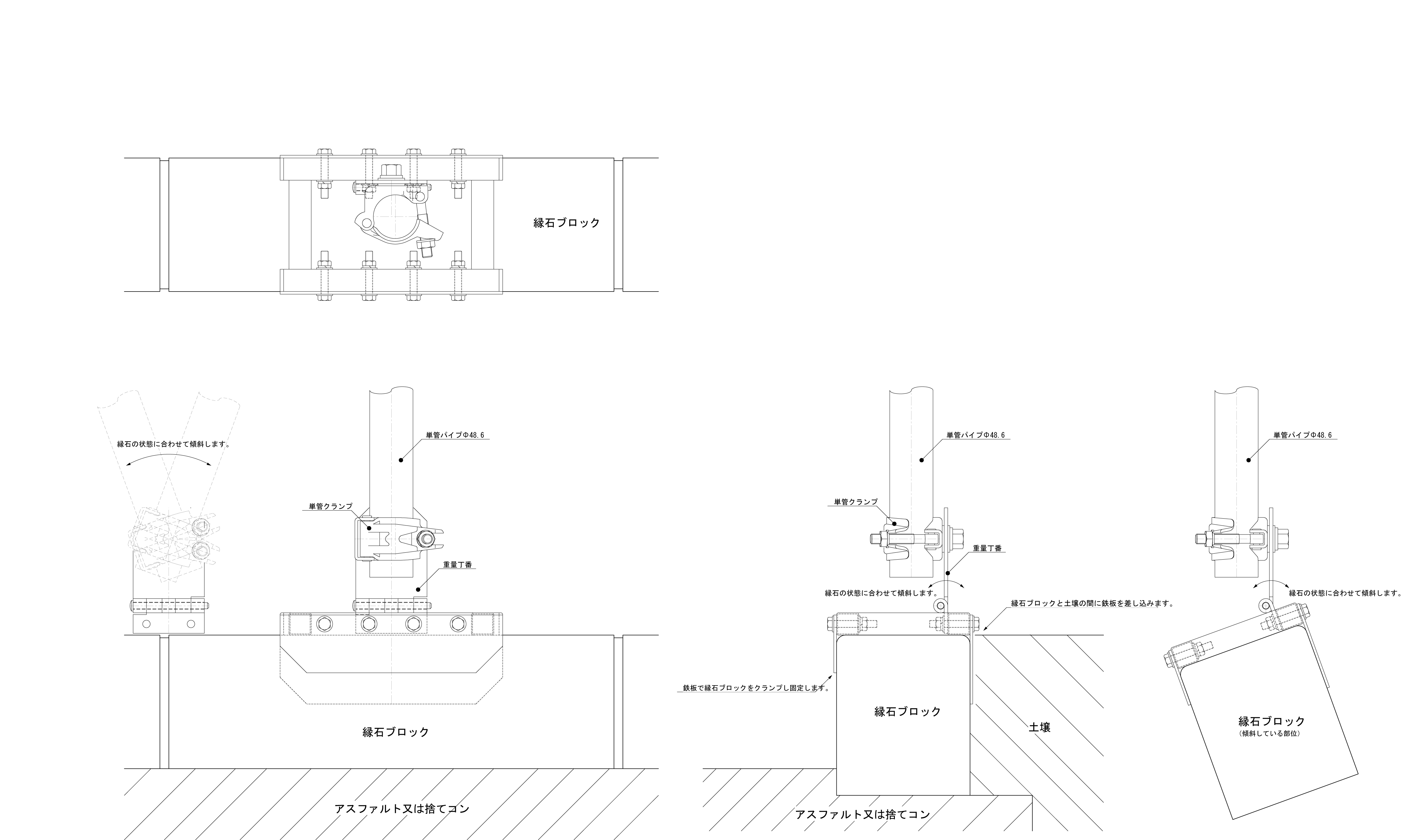
仕方ないから作ってます。
#ガチ工作
道路の分離帯みたいなところに生えている桜をライトアップするのですが条件が厳しい。
1)桜の根が傷むから地面にアンカー類は打たないこと。
2)(1)と同じ理由で土壌に加重を掛けないこと。
3)桜の幹に縛り付けるような取り付けをしないこと。
4)歩道、道路にはみ出さないこと。
5)アスファルトやコンクリート、縁石に穴を空けないこと。
6)現状復帰は厳重にすること。
桜の保全を優先するなら真っ当なご指示なんですが、灯具を宙に浮かすのかい?って話です。
唯一可能なのは、分離帯を囲む縁石に金具をクランプして荷重を掛けつつ固定する方法。
しかし、土壌は縁石の上面ギリギリまで攻めており、縁石自体傾いたりしています。
方針は、
1)縁石と土壌の間に薄い鉄板を打ち込む特殊なコの字クランプを構成する。
2)クランプから架台本体への繋がりには2軸の自在関節を入れる。
となります。
言うのは簡単ですが、私が出来る加工と予算の範囲でこんな物を作れるのかいな?
仕方ないから作ってます。
#ガチ工作
2023年2月 この範囲を時系列順で読む この範囲をファイルに出力する
故障した中華電機のムービングライトは回復しました。
予想通りRS485のトランシーバーICがダメだったようです。
ただ、治ったのはいいですが、そもそもナゼ壊れたのか。
SN75176系が静電気に弱いのは事実ですが、基板間の通信ですから外部配線にさらされることはありませんし、同様のICを使っている受け側は壊れていいませんので、静電気が原因だとしてもどこから回り込んでナゼこれだけなのか。同じ基板に搭載されている他のICは壊れていませんので、起動時の瞬間的な電圧異常が原因だったとしてもナゼこのICだけなのか。他のICはサージ保護が施されているのかもしれませんけれど。
原因不明なので再発の可能性は十分にあります。他の機体が同様の故障を起こすかもしれません。
RS485トランシーバーICは10個単位の販売でしたので予備はあります。しばらく様子見です。
追記
RS485トランシーバーICはSN75176互換の3.3vSOP-8パッケージの品なら使えそうです。今回は全く同じモノを中華電機から仕入れましたが、秋月さんでも互換品が手に入ります。
静電気にも過電圧にも強いLT1785の姉妹品に3.3vのSOP-8パッケージの物があればいいのですけどね。
実験で電子ライターの火花を与えたことがありますが、SN75176は即死、LT1785は損傷しませんでした。
追伸2
LT1785と同等の耐久性を持つ定格電圧3.0~5.5v品がありました。S8パッケージのLTC2862-2(max250kbps)です。
過電圧耐性±60v、EMI(静電気耐性)1.5kvです。壊そうとしても簡単には壊せないかも。姉妹品のLTC2862-1は高スペックで20Mbpsまで対応しますがオーバースペックです。
パッケージはS8とありますがSOP-8と同等の様です。
ネット検索では国内小売りにもAliExpressにも見当たりません。入手性に難ありです。
#照明器具 #電子工作
予想通りRS485のトランシーバーICがダメだったようです。
ただ、治ったのはいいですが、そもそもナゼ壊れたのか。
SN75176系が静電気に弱いのは事実ですが、基板間の通信ですから外部配線にさらされることはありませんし、同様のICを使っている受け側は壊れていいませんので、静電気が原因だとしてもどこから回り込んでナゼこれだけなのか。同じ基板に搭載されている他のICは壊れていませんので、起動時の瞬間的な電圧異常が原因だったとしてもナゼこのICだけなのか。他のICはサージ保護が施されているのかもしれませんけれど。
原因不明なので再発の可能性は十分にあります。他の機体が同様の故障を起こすかもしれません。
RS485トランシーバーICは10個単位の販売でしたので予備はあります。しばらく様子見です。
追記
RS485トランシーバーICはSN75176互換の3.3vSOP-8パッケージの品なら使えそうです。今回は全く同じモノを中華電機から仕入れましたが、秋月さんでも互換品が手に入ります。
静電気にも過電圧にも強いLT1785の姉妹品に3.3vのSOP-8パッケージの物があればいいのですけどね。
実験で電子ライターの火花を与えたことがありますが、SN75176は即死、LT1785は損傷しませんでした。
追伸2
LT1785と同等の耐久性を持つ定格電圧3.0~5.5v品がありました。S8パッケージのLTC2862-2(max250kbps)です。
過電圧耐性±60v、EMI(静電気耐性)1.5kvです。壊そうとしても簡単には壊せないかも。姉妹品のLTC2862-1は高スペックで20Mbpsまで対応しますがオーバースペックです。
パッケージはS8とありますがSOP-8と同等の様です。
ネット検索では国内小売りにもAliExpressにも見当たりません。入手性に難ありです。
#照明器具 #電子工作
Art-Net製品はほぼ趣味で開発しているのでいいですが、DoctorMXで有名なクワテックさんのラインナップは素晴らしいです。
是非ゴングインターナショナルさんのサイトからご覧になって頂きたいですが、間違いなく世界レベルの製品ばかりです。業界内には国産のDMX関連製品を正しく評価していない気配があるように思いますが、DMX関連品の導入をお考えなら海外製品の前にクワテック製品を検討することをお勧めします。リクエストすると機能を追加してくれたりしますしね。
最近多くなったライトアップに於いても、ショーコントローラーValenciaの導入を検討しています。半仮設用途に向いたDMXも扱えるマルチメディアシーケンサーは他に無いと言ってもよく、なんと言っても特定の日、特定の曜日でショーの実施を設定できるのは強味です。ダスライトの上位機種にも同様のカレンダー機能はありますが、そもそも明かり作りのツールとして個人的には嫌いです。
余談ですが間違っても案件ステマではありません。ゴングさんから購入することは少なくありませんが、クワテックさん程の開発力があったらなぁ~と羨望の気持ちでカタログを眺めているだけですwww
#照明器具
是非ゴングインターナショナルさんのサイトからご覧になって頂きたいですが、間違いなく世界レベルの製品ばかりです。業界内には国産のDMX関連製品を正しく評価していない気配があるように思いますが、DMX関連品の導入をお考えなら海外製品の前にクワテック製品を検討することをお勧めします。リクエストすると機能を追加してくれたりしますしね。
最近多くなったライトアップに於いても、ショーコントローラーValenciaの導入を検討しています。半仮設用途に向いたDMXも扱えるマルチメディアシーケンサーは他に無いと言ってもよく、なんと言っても特定の日、特定の曜日でショーの実施を設定できるのは強味です。ダスライトの上位機種にも同様のカレンダー機能はありますが、そもそも明かり作りのツールとして個人的には嫌いです。
余談ですが間違っても案件ステマではありません。ゴングさんから購入することは少なくありませんが、クワテックさん程の開発力があったらなぁ~と羨望の気持ちでカタログを眺めているだけですwww
#照明器具
ANSIエスケープシーケンスによるテキスト画面表示はやりたいことのやり方が見えてきました。先にも書いた通り、ウィンドウマネージャに近い考え方で関数ライブラリにまとめる方針です。
ArtNet-Engineの主処理を書き進めたいところですが、処理の状況を確認する手段が無いと作業性が悪いので画面表示を一通り作ってしまおうという考え方です。
平行してコマンド入力も作っています。ArtNet-Engineの主処理に先行するのは画面と同じ理由ですが、この辺りが見えてこないと処理全体の構成を決めかねることにも繋がるからです。
ですが、コマンド入力がなかなか手ごわい。画面表示であれば決められた手順で結果が出ればいいのですが、コマンド入力は規則性が薄いユーザーの操作を受け付けるからです。scanf()などを用いて文字列を取得するのは簡単ですが、これではイメージする操作性にはなりません。特定のキーをショートカットのコマンド入力とし、一つ目のコマンドに続くコマンドを制限したい。コマンドに与える数値も範囲を制限もしたい。もちろん、適切なエラーメッセージを入力の都度出したい。キー入力の都度、制限と処理を行うことになりますが案外難しい。ダラダラとコマンド毎に専用処理を書いてもいいのですが、メンテナンス性を考えると出来るだけ汎用化したい。もちろん、他のコマンドを学習したユーザーがこのコマンドはこう打てばいいだろうと予測出来る適切なコマンド体系にもしたい。プログラムを書く前のアルゴリズムを考えるのに難儀しています。
#[Art-Net] #C言語
ArtNet-Engineの主処理を書き進めたいところですが、処理の状況を確認する手段が無いと作業性が悪いので画面表示を一通り作ってしまおうという考え方です。
平行してコマンド入力も作っています。ArtNet-Engineの主処理に先行するのは画面と同じ理由ですが、この辺りが見えてこないと処理全体の構成を決めかねることにも繋がるからです。
ですが、コマンド入力がなかなか手ごわい。画面表示であれば決められた手順で結果が出ればいいのですが、コマンド入力は規則性が薄いユーザーの操作を受け付けるからです。scanf()などを用いて文字列を取得するのは簡単ですが、これではイメージする操作性にはなりません。特定のキーをショートカットのコマンド入力とし、一つ目のコマンドに続くコマンドを制限したい。コマンドに与える数値も範囲を制限もしたい。もちろん、適切なエラーメッセージを入力の都度出したい。キー入力の都度、制限と処理を行うことになりますが案外難しい。ダラダラとコマンド毎に専用処理を書いてもいいのですが、メンテナンス性を考えると出来るだけ汎用化したい。もちろん、他のコマンドを学習したユーザーがこのコマンドはこう打てばいいだろうと予測出来る適切なコマンド体系にもしたい。プログラムを書く前のアルゴリズムを考えるのに難儀しています。
#[Art-Net] #C言語
2022年12月 この範囲を時系列順で読む この範囲をファイルに出力する
今は資料映像の書き出し待ちです。
polymakerのABSフィラメントが入荷したので試したいけど時間がありません。
本業では「私だけ、ちょっとだけ」のオーダーが山積しており、ここ数日は自由な時間がほとんど取れません。つか、睡眠時間を確保するだけで精一杯。
お仕事を頂けるのはありがたいのですが、自分の用件を優先的に捻じ込もうと言質を取るというか揚げ足を取るというか勝手な解釈をする輩が居てとても不愉快だったりします。「この3日間のどれかは空くかもしれない」と伝えたのに「その3日のウチ、客先の都合で調整します」と返して来たアホがいる。なぜ、指定には合わせられないとかすべてダメかもしれないと言っていることを理解出来ないことが理解不能。
自分に向けての言葉でもありますが、なんかこうコロナを経て世の中の心が狭くなっているような気がします。
#雑談
polymakerのABSフィラメントが入荷したので試したいけど時間がありません。
本業では「私だけ、ちょっとだけ」のオーダーが山積しており、ここ数日は自由な時間がほとんど取れません。つか、睡眠時間を確保するだけで精一杯。
お仕事を頂けるのはありがたいのですが、自分の用件を優先的に捻じ込もうと言質を取るというか揚げ足を取るというか勝手な解釈をする輩が居てとても不愉快だったりします。「この3日間のどれかは空くかもしれない」と伝えたのに「その3日のウチ、客先の都合で調整します」と返して来たアホがいる。なぜ、指定には合わせられないとかすべてダメかもしれないと言っていることを理解出来ないことが理解不能。
自分に向けての言葉でもありますが、なんかこうコロナを経て世の中の心が狭くなっているような気がします。
#雑談
2022年11月 この範囲を時系列順で読む この範囲をファイルに出力する
久しぶりに車で都内に行きましたが帰りに大渋滞。普段なら多少渋滞があっても2時間もあれば走り切ってしまう行程に4時間半もかかる。
都心の道ですから仕方ないと思っていたのですが、原因が事故の見物。
乗用車3台が車種の判別できないくらい大破していたのは気の毒なことですが、その横を安全のための徐行でなく見物のためと思われる必要以上の低速で進む数台先の車たち。ほんの数秒ではあるものの一時停止をしている車さえある始末。事故を起こしたドライバーも誉められたものではありませんが、何の価値もない見物のために渋滞を作り出すドライバーには免許を返上していただきたいものです。
ちょっとの身勝手なら構わないよね・・・といったことをとても沢山の方々から頂戴している最中でもあるため、殺意にも似た感情すら込み上げます(笑
#雑談
都心の道ですから仕方ないと思っていたのですが、原因が事故の見物。
乗用車3台が車種の判別できないくらい大破していたのは気の毒なことですが、その横を安全のための徐行でなく見物のためと思われる必要以上の低速で進む数台先の車たち。ほんの数秒ではあるものの一時停止をしている車さえある始末。事故を起こしたドライバーも誉められたものではありませんが、何の価値もない見物のために渋滞を作り出すドライバーには免許を返上していただきたいものです。
ちょっとの身勝手なら構わないよね・・・といったことをとても沢山の方々から頂戴している最中でもあるため、殺意にも似た感情すら込み上げます(笑
#雑談
2022年10月 この範囲を時系列順で読む この範囲をファイルに出力する
インターカムパワーサプライの基板が入荷しました。
今までより少し時間がかかった感じがしますが、それでも土日含めて8日間。十分満足。
仕上がりもキレイです。
#電子工作
今までより少し時間がかかった感じがしますが、それでも土日含めて8日間。十分満足。
仕上がりもキレイです。
#電子工作